Extends from Modelica.Icons.VariantsPackage (Icon for package containing variants).
| Name | Description |
|---|---|
| Ideal motor model with hysteresis | |
| Collection of models that illustrate model use and test models |
 Buildings.Fluid.Actuators.Motors.IdealMotor
Buildings.Fluid.Actuators.Motors.IdealMotor
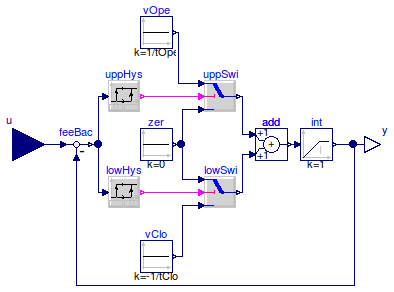
y is below (or above) the
input signal u by an amount bigger than the hysteresis
delta, then the position y is increased (decreased)
until it reaches u.
The output y is bounded between 0 and 1.
Note: This model can introduce state events which increase the computation time.
For a more efficient implementation that approximates a motor, set in
the valve or damper model the parameter filteredOpening=true
instead of using this motor model.
See also
Buildings.Fluid.Actuators.UsersGuide.
Extends from Modelica.Blocks.Interfaces.SISO (Single Input Single Output continuous control block).
| Type | Name | Default | Description |
|---|---|---|---|
| Real | delta | 0.05 | Hysteresis |
| Time | tOpe | 120 | Opening time [s] |
| Time | tClo | tOpe | Closing time [s] |
| Real | y_start | 0.5 | Start position |
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Connector of Real input signal |
| output RealOutput | y | Connector of Real output signal |
model IdealMotor "Ideal motor model with hysteresis" extends Modelica.Blocks.Interfaces.SISO; parameter Real delta(min=0, max=0.5) = 0.05 "Hysteresis"; parameter Modelica.SIunits.Time tOpe(min=0) = 120 "Opening time"; parameter Modelica.SIunits.Time tClo(min=0) = tOpe "Closing time"; parameter Real y_start(min=0, max=1) = 0.5 "Start position";Modelica.Blocks.Logical.Hysteresis uppHys(final uLow=0, uHigh=delta, final pre_y_start=false); Modelica.Blocks.Logical.Hysteresis lowHys(uLow=-delta, final uHigh=0, final pre_y_start=true) "Lower hysteresis"; Modelica.Blocks.Logical.Switch uppSwi; Modelica.Blocks.Continuous.LimIntegrator int( final y_start=y_start, final k=1, outMax=1, outMin=0, initType=Modelica.Blocks.Types.Init.InitialState, limitsAtInit=true, y(stateSelect=StateSelect.always)) "Integrator for valve opening position"; protected final Modelica.Blocks.Sources.Constant zer(final k=0) "Zero signal"; Modelica.Blocks.Sources.Constant vOpe(final k=1/tOpe) "Opening speed"; Modelica.Blocks.Sources.Constant vClo(final k=-1/tClo) "Closing speed"; Modelica.Blocks.Logical.Switch lowSwi; Modelica.Blocks.Math.Add add; Modelica.Blocks.Math.Feedback feeBac "Feedback to compute position error"; equationconnect(zer.y, uppSwi.u3); connect(uppHys.y, uppSwi.u2); connect(vOpe.y, uppSwi.u1); connect(lowHys.y, lowSwi.u2); connect(vClo.y, lowSwi.u3); connect(zer.y, lowSwi.u1); connect(add.y, int.u); connect(uppSwi.y, add.u1); connect(u, feeBac.u1); connect(feeBac.y, uppHys.u); connect(feeBac.y, lowHys.u); connect(lowSwi.y, add.u2); connect(int.y, y); connect(int.y, feeBac.u2); end IdealMotor;