This package contains examples for the use of models that can be found in Buildings.Controls.Continuous.
Extends from Modelica.Icons.ExamplesPackage (Icon for packages containing runnable examples).
| Name | Description |
|---|---|
| Example model | |
| Example model | |
| Example model | |
| Example model | |
| Example model | |
| Example model |
 Buildings.Controls.Continuous.Examples.LimPID
Buildings.Controls.Continuous.Examples.LimPID
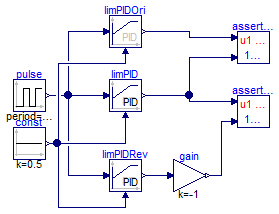
model LimPID "Example model" extends Modelica.Icons.Example; import Buildings;Modelica.Blocks.Sources.Pulse pulse(period=0.25); Buildings.Controls.Continuous.LimPID limPID( controllerType=Modelica.Blocks.Types.SimpleController.PID, Ti=1, Td=1, yMax=1, yMin=-1, initType=Modelica.Blocks.Types.InitPID.InitialState); Buildings.Controls.Continuous.LimPID limPIDRev( controllerType=Modelica.Blocks.Types.SimpleController.PID, reverseAction=true, Ti=1, Td=1, yMax=1, yMin=-1, initType=Modelica.Blocks.Types.InitPID.InitialState) "Controller with reverse action"; Modelica.Blocks.Sources.Constant const(k=0.5); Modelica.Blocks.Math.Gain gain(k=-1); Buildings.Utilities.Diagnostics.AssertEquality assertEquality(threShold=1e-10); Modelica.Blocks.Continuous.LimPID limPIDOri( controllerType=Modelica.Blocks.Types.SimpleController.PID, Ti=1, Td=1, yMax=1, yMin=-1, initType=Modelica.Blocks.Types.InitPID.InitialState); Buildings.Utilities.Diagnostics.AssertEquality assertEquality1( threShold=1e-10); equationconnect(pulse.y, limPID.u_s); connect(pulse.y, limPIDRev.u_s); connect(const.y, limPID.u_m); connect(const.y, limPIDRev.u_m); connect(limPIDRev.y, gain.u); connect(gain.y, assertEquality.u2); connect(limPID.y, assertEquality.u1); connect(pulse.y, limPIDOri.u_s); connect(const.y, limPIDOri.u_m); connect(assertEquality1.u1, limPIDOri.y); connect(assertEquality1.u2, limPID.y); end LimPID;
Buildings.Controls.Continuous.Examples.PIDHysteresis
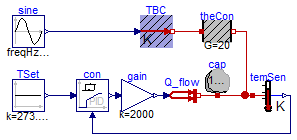
model PIDHysteresis "Example model" extends Modelica.Icons.Example; import Buildings;Buildings.Controls.Continuous.PIDHysteresis con( pre_y_start=false, controllerType=Modelica.Blocks.Types.SimpleController.PI, yMin=0.3, Ti=600, Td=60); Modelica.Blocks.Sources.Constant TSet(k=273.15 + 40) "Set point"; Modelica.Thermal.HeatTransfer.Components.HeatCapacitor cap(C=1000000, T(start= 313.15, fixed=true)); Buildings.HeatTransfer.Sources.PrescribedTemperature TBC; Modelica.Thermal.HeatTransfer.Components.ThermalConductor theCon(G=20); Modelica.Blocks.Math.Gain gain(k=2000); Modelica.Thermal.HeatTransfer.Sensors.TemperatureSensor temSen; Buildings.HeatTransfer.Sources.PrescribedHeatFlow Q_flow; Modelica.Blocks.Sources.Sine sine( freqHz=1/86400, offset=273.15, amplitude=20, phase=-1.5707963267949); equationconnect(TSet.y, con.u_s); connect(TBC.port, theCon.port_a); connect(theCon.port_b, cap.port); connect(con.y, gain.u); connect(cap.port, temSen.port); connect(temSen.T, con.u_m); connect(gain.y, Q_flow.Q_flow); connect(Q_flow.port, cap.port); connect(sine.y, TBC.T); end PIDHysteresis;
Buildings.Controls.Continuous.Examples.PIDHysteresisTimer
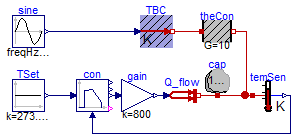
model PIDHysteresisTimer "Example model" extends Modelica.Icons.Example; import Buildings;Buildings.Controls.Continuous.PIDHysteresisTimer con( yMin=0.3, minOffTime=10000, controllerType=Modelica.Blocks.Types.SimpleController.PI, Ti=60, Td=10); Modelica.Blocks.Sources.Constant TSet(k=273.15 + 40) "Set point"; Modelica.Thermal.HeatTransfer.Components.HeatCapacitor cap(C=100000, T(start= 293.15, fixed=true)); Buildings.HeatTransfer.Sources.PrescribedTemperature TBC; Modelica.Thermal.HeatTransfer.Components.ThermalConductor theCon(G=10); Modelica.Blocks.Math.Gain gain(k=800); Modelica.Thermal.HeatTransfer.Sensors.TemperatureSensor temSen; Buildings.HeatTransfer.Sources.PrescribedHeatFlow Q_flow; Modelica.Blocks.Sources.Sine sine( freqHz=1/86400, offset=273.15, amplitude=20, phase=-1.5707963267949); equationconnect(TSet.y, con.u_s); connect(TBC.port, theCon.port_a); connect(theCon.port_b, cap.port); connect(con.y, gain.u); connect(cap.port, temSen.port); connect(temSen.T, con.u_m); connect(gain.y, Q_flow.Q_flow); connect(Q_flow.port, cap.port); connect(sine.y, TBC.T); end PIDHysteresisTimer;
Buildings.Controls.Continuous.Examples.SignalRanker
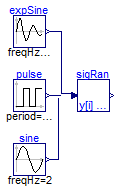
model SignalRanker "Example model" extends Modelica.Icons.Example;Modelica.Blocks.Sources.Sine sine(freqHz=2); Modelica.Blocks.Sources.Pulse pulse(period=0.25); Buildings.Controls.Continuous.SignalRanker sigRan( nin=3); Modelica.Blocks.Sources.ExpSine expSine(freqHz=10); equationconnect(sine.y, sigRan.u[1]); connect(pulse.y, sigRan.u[2]); connect(expSine.y, sigRan.u[3]); end SignalRanker;
Buildings.Controls.Continuous.Examples.NumberOfRequests
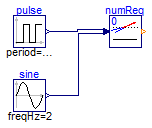
model NumberOfRequests "Example model" extends Modelica.Icons.Example;Buildings.Controls.Continuous.NumberOfRequests numReq( nin=2, threShold=0, kind=0); Modelica.Blocks.Sources.Sine sine(freqHz=2); Modelica.Blocks.Sources.Pulse pulse(period=0.25); equationconnect(sine.y, numReq.u[1]); connect(pulse.y, numReq.u[2]); end NumberOfRequests;
Buildings.Controls.Continuous.Examples.OffTimer
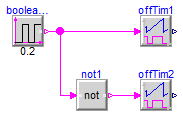
model OffTimer "Example model" extends Modelica.Icons.Example; import Buildings;Modelica.Blocks.Sources.BooleanPulse booleanPulse(period=0.2); Buildings.Controls.Continuous.OffTimer offTim1; Buildings.Controls.Continuous.OffTimer offTim2; Modelica.Blocks.Logical.Not not1; equationconnect(booleanPulse.y, offTim1.u); connect(booleanPulse.y, not1.u); connect(offTim2.u, not1.y); end OffTimer;