Buildings.Controls.Continuous.Validation
Collection of validation models
Information
This package contains validation models for the classes in Buildings.Controls.Continuous.
Note that most validation models contain simple input data which may not be realistic, but for which the correct output can be obtained through an analytic solution. The examples plot various outputs, which have been verified against these solutions. These model outputs are stored as reference data and used for continuous validation whenever models in the library change.
Extends from Modelica.Icons.ExamplesPackage (Icon for packages containing runnable examples).
Package Content
| Name | Description |
|---|---|
| Test model for PID controller with optional intgerator reset | |
| Test model for off timer with negative start time |
 Buildings.Controls.Continuous.Validation.LimPIDReset
Buildings.Controls.Continuous.Validation.LimPIDReset
Test model for PID controller with optional intgerator reset
Information
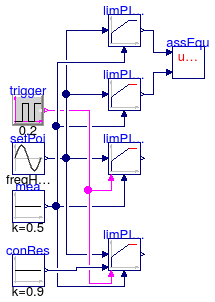
This model tests the implementation the Buildings.Controls.Continuous.LimPID with integrator reset.
The instance limPIOri is the original implementation of the controller
from the Modelica Standard Library.
The instance limPIWithReset is the implementation from this library
with integrator reset enabled. Whenever the boolean pulse input becomes true,
the integrator is reset to y_reset.
Extends from Modelica.Icons.Example (Icon for runnable examples).
Modelica definition
Buildings.Controls.Continuous.Validation.OffTimerNonZeroStart
Test model for off timer with negative start time
Information
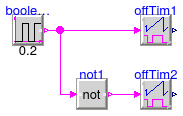
This model tests the implementation the Buildings.Controls.Continuous.OffTimer for negative start time.
Extends from Buildings.Controls.Continuous.Examples.OffTimer (Example model for off timer).