This package contains component models that are used to construct the control system in Buildings.Examples.ChillerPlant.
Extends from Modelica.Icons.VariantsPackage (Icon for package containing variants).
| Name | Description |
|---|---|
| Control unit for enabling/disabling chiller | |
| Output y=k-u | |
| A two-pieces linear piecewise function | |
| Count the number of actuators that have request | |
| Trim and respond logic | |
| Trim and respond logic | |
| Control unit for WSE | |
| Test of components |
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.ChillerSwitch
Buildings.Examples.ChillerPlant.BaseClasses.Controls.ChillerSwitch
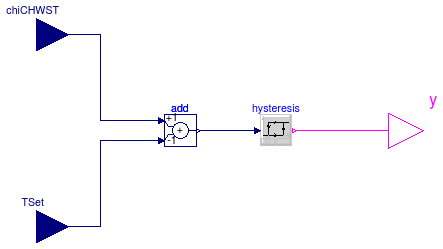
TChi_CHWST > TChiSet + TDeaBan
TChi_CHWST ≤ TChiSet
TChi_CHWST is chiller chilled water supply temperature, TChiSet is set temperature for chilled water leaving chiller, and TDeaBan is dead band to prevent short cycling.
Extends from Modelica.Blocks.Interfaces.BlockIcon (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
| Temperature | deaBan | Dead band of temperature to prevent chiller short cycling [K] |
| Type | Name | Description |
|---|---|---|
| input RealInput | chiCHWST | Chiller chilled water supply temperature (water entering chiller) [K] |
| output BooleanOutput | y | Control signal for chiller. 1: Enable, 0: Disable |
| input RealInput | TSet | Set temperature of chiller [K] |
block ChillerSwitch "Control unit for enabling/disabling chiller" extends Modelica.Blocks.Interfaces.BlockIcon;Modelica.Blocks.Interfaces.RealInput chiCHWST( final quantity="Temperature", final unit="K", displayUnit="deg") "Chiller chilled water supply temperature (water entering chiller)"; Modelica.Blocks.Interfaces.BooleanOutput y "Control signal for chiller. 1: Enable, 0: Disable"; Modelica.Blocks.Interfaces.RealInput TSet( final quantity="Temperature", final unit="K", displayUnit="deg") "Set temperature of chiller"; parameter Modelica.SIunits.Temperature deaBan "Dead band of temperature to prevent chiller short cycling";Modelica.Blocks.Logical.Hysteresis hysteresis(uLow=0, uHigh=deaBan); Modelica.Blocks.Math.Add add(k1=+1, k2=-1); equationconnect(hysteresis.y, y); connect(chiCHWST, add.u1); connect(TSet, add.u2); connect(add.y, hysteresis.u); end ChillerSwitch;
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.KMinusU
Buildings.Examples.ChillerPlant.BaseClasses.Controls.KMinusU

y = k - u.
Extends from Modelica.Blocks.Interfaces.BlockIcon (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
| Real | k | Sum of u and y |
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Input |
| output RealOutput | y | Output |
block KMinusU "Output y=k-u" extends Modelica.Blocks.Interfaces.BlockIcon; public parameter Real k "Sum of u and y";Modelica.Blocks.Interfaces.RealInput u "Input"; Modelica.Blocks.Interfaces.RealOutput y "Output"; equation y = k - u;end KMinusU;
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.LinearPiecewiseTwo
Buildings.Examples.ChillerPlant.BaseClasses.Controls.LinearPiecewiseTwo
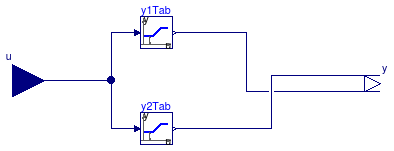
This component calcuates the output according to two piecewise linear function as
| u ∈ [x0, x1]: | y1 = y10 + u (y11-y10)/(x1-x0) y2 = y20 |
| u ∈ (x1, x2]: | y1 = y11 y2 = y20 + (u-x1) (y21-y20)/(x2-x1) |
Extends from Modelica.Blocks.Interfaces.BlockIcon (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
| Real | x0 | First interval [x0, x1] | |
| Real | x1 | First interval [x0, x1] and second interval (x1, x2] | |
| Real | x2 | Second interval (x1, x2] | |
| Real | y10 | y[1] at u = x0 | |
| Real | y11 | y[1] at u = x1 | |
| Real | y20 | y[2] at u = x1 | |
| Real | y21 | y[2] at u = x2 |
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Set point |
| output RealOutput | y[2] | Connectors of Real output signal |
block LinearPiecewiseTwo "A two-pieces linear piecewise function" extends Modelica.Blocks.Interfaces.BlockIcon; parameter Real x0 "First interval [x0, x1]"; parameter Real x1 "First interval [x0, x1] and second interval (x1, x2]"; parameter Real x2 "Second interval (x1, x2]"; parameter Real y10 "y[1] at u = x0"; parameter Real y11 "y[1] at u = x1"; parameter Real y20 "y[2] at u = x1"; parameter Real y21 "y[2] at u = x2";Modelica.Blocks.Interfaces.RealInput u "Set point"; Modelica.Blocks.Interfaces.RealOutput y[2] "Connectors of Real output signal"; Buildings.Controls.SetPoints.Table y1Tab(table=[x0, y10; x1, y11; x2, y11]) "Tabel for y[1]"; Buildings.Controls.SetPoints.Table y2Tab(table=[x0, y20; x1, y20; x2, y21]) "Tabel for y[2]"; equationconnect(u, y1Tab.u); connect(u, y2Tab.u); connect(y1Tab.y, y[1]); connect(y2Tab.y, y[2]); end LinearPiecewiseTwo;
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.RequestCounter
Buildings.Examples.ChillerPlant.BaseClasses.Controls.RequestCounter
uAct[i] is larger than uTri.
Extends from Modelica.Blocks.Interfaces.BlockIcon (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
| Integer | nAct | Number of actuators | |
| Real | uTri | Value to trigger a request from actuator |
| Type | Name | Description |
|---|---|---|
| output IntegerOutput | nInc | Number of actuators requesting control signal increase |
| input RealInput | uAct[nAct] | Input signal from actuators |
block RequestCounter "Count the number of actuators that have request" extends Modelica.Blocks.Interfaces.BlockIcon; parameter Integer nAct "Number of actuators"; parameter Real uTri "Value to trigger a request from actuator";Modelica.Blocks.Interfaces.IntegerOutput nInc "Number of actuators requesting control signal increase"; Modelica.Blocks.Interfaces.RealInput uAct[nAct] "Input signal from actuators"; algorithm nInc := 0; for i in 1:nAct loop if uAct[i] > uTri then nInc := nInc + 1; end if; end for;end RequestCounter;
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.TrimAndRespond
Buildings.Examples.ChillerPlant.BaseClasses.Controls.TrimAndRespond
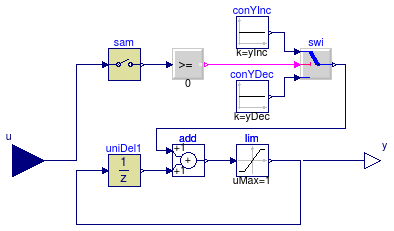
This model implements the trim and respond logic. The model samples the outputs of actuators every tSam.
The control sequence is as follows:
u ≥ 0, then y = y + nActInc,u < 0, then y = y - yDec.Extends from Modelica.Blocks.Interfaces.DiscreteSISO (Single Input Single Output discrete control block).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | samplePeriod | Sample period of component [s] | |
| Time | startTime | 0 | First sample time instant [s] |
| Real | uTri | Value to triggering the request for actuator | |
| Real | yEqu0 | y setpoint when equipment starts | |
| Real | yDec | y decrement (must be negative) | |
| Real | yInc | y increment (must be positive) |
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Continuous input signal |
| output RealOutput | y | Continuous output signal |
block TrimAndRespond "Trim and respond logic" extends Modelica.Blocks.Interfaces.DiscreteSISO; parameter Real uTri "Value to triggering the request for actuator"; parameter Real yEqu0 "y setpoint when equipment starts"; parameter Real yDec(max=0) "y decrement (must be negative)"; parameter Real yInc(min=0) "y increment (must be positive)";Modelica.Blocks.Logical.GreaterEqualThreshold incY(threshold=0) "Outputs true if y needs to be increased"; Modelica.Blocks.Logical.Switch swi; Modelica.Blocks.Discrete.Sampler sam(samplePeriod=samplePeriod) "Sampler"; Modelica.Blocks.Sources.Constant conYDec(k=yDec) "y decrease"; Modelica.Blocks.Sources.Constant conYInc(k=yInc) "y increase"; Modelica.Blocks.Discrete.UnitDelay uniDel1( y_start=yEqu0, samplePeriod=samplePeriod, startTime=samplePeriod); Modelica.Blocks.Math.Add add; Modelica.Blocks.Nonlinear.Limiter lim(uMax=1, uMin=0) "State limiter"; equationconnect(lim.y, y); connect(add.y, lim.u); connect(uniDel1.y, add.u2); connect(incY.y, swi.u2); connect(sam.y, incY.u); connect(lim.y, uniDel1.u); connect(swi.y, add.u1); connect(swi.u3, conYDec.y); connect(conYInc.y, swi.u1); connect(sam.u, u); end TrimAndRespond;
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.TrimAndRespondContinuousTimeApproximation
Buildings.Examples.ChillerPlant.BaseClasses.Controls.TrimAndRespondContinuousTimeApproximation
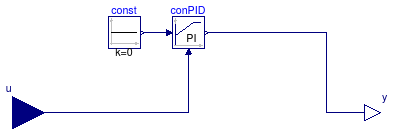
This model implements a continuous time approximation to the trim and respond control algorithm.
Extends from Modelica.Blocks.Interfaces.SISO (Single Input Single Output continuous control block).
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Connector of Real input signal |
| output RealOutput | y | Connector of Real output signal |
block TrimAndRespondContinuousTimeApproximation "Trim and respond logic" import Buildings; extends Modelica.Blocks.Interfaces.SISO;Buildings.Controls.Continuous.LimPID conPID( Td=1, yMax=1, yMin=0, reverseAction=true, controllerType=Modelica.Blocks.Types.SimpleController.PI, Ti=120, k=0.1); Modelica.Blocks.Sources.Constant const(k=0); equationconnect(const.y, conPID.u_s); connect(conPID.y, y); connect(u, conPID.u_m); end TrimAndRespondContinuousTimeApproximation;
 Buildings.Examples.ChillerPlant.BaseClasses.Controls.WSEControl
Buildings.Examples.ChillerPlant.BaseClasses.Controls.WSEControl
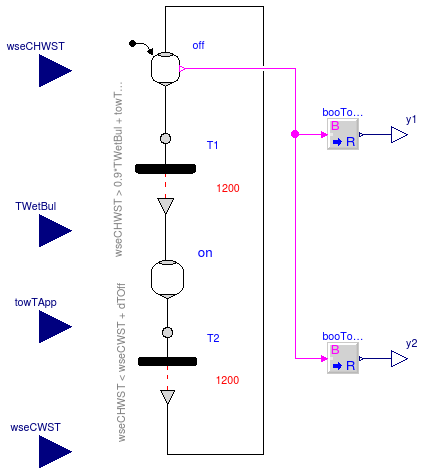
This component decides if the WSE is set to on or off. The WSE is enabled when
| Type | Name | Default | Description |
|---|---|---|---|
| TemperatureDifference | dTOff | 1 | Temperature difference to switch WSE off [K] |
| TemperatureDifference | dTW | 1 | Temperature difference that is added to WSE on guard [K] |
| Type | Name | Description |
|---|---|---|
| input RealInput | wseCHWST | WSE chilled water supply temperature (water entering WSE) [K] |
| output RealOutput | y2 | Control signal for chiller shutoff valve |
| input RealInput | TWetBul | Wet bulb temperature [K] |
| input RealInput | towTApp | Cooling tower approach [K] |
| input RealInput | wseCWST | WSE condenser water supply temperature (water entering WSE) [K] |
| output RealOutput | y1 | Control signal for WSE shutoff valve |
model WSEControl "Control unit for WSE"
parameter Modelica.SIunits.TemperatureDifference dTOff = 1
"Temperature difference to switch WSE off";
parameter Modelica.SIunits.TemperatureDifference dTW = 1
"Temperature difference that is added to WSE on guard";
Modelica.Blocks.Interfaces.RealInput wseCHWST(
final quantity="Temperature",
final unit="K",
displayUnit="deg")
"WSE chilled water supply temperature (water entering WSE)";
Modelica.Blocks.Interfaces.RealOutput y2
"Control signal for chiller shutoff valve";
Modelica.Blocks.Interfaces.RealInput TWetBul(
final quantity="Temperature",
final unit="K",
displayUnit="deg") "Wet bulb temperature";
Modelica.Blocks.Interfaces.RealInput towTApp(
final quantity="Temperature",
final unit="K",
displayUnit="deg") "Cooling tower approach";
Modelica.Blocks.Interfaces.RealInput wseCWST(
final quantity="Temperature",
final unit="K",
displayUnit="deg")
"WSE condenser water supply temperature (water entering WSE)";
Modelica.Blocks.Math.BooleanToReal booToRea2;
Modelica.Blocks.Interfaces.RealOutput y1
"Control signal for WSE shutoff valve";
Modelica_StateGraph2.Step off(
use_activePort=true,
nOut=1,
nIn=1,
initialStep=true);
Modelica_StateGraph2.Transition T1(delayedTransition=true, waitTime=1200,
use_conditionPort=false,
condition=wseCHWST > 0.9*TWetBul + towTApp + dTW);
Modelica_StateGraph2.Step on(nIn=1, nOut=1,
initialStep=false);
Modelica_StateGraph2.Transition T2(delayedTransition=true, waitTime=1200,
use_conditionPort=false,
condition=wseCHWST < wseCWST + dTOff);
Modelica.Blocks.Math.BooleanToReal booToRea1(realTrue=0, realFalse=1);
equation
connect(booToRea2.y, y2);
connect(off.outPort[1], T1.inPort);
connect(T1.outPort, on.inPort[1]);
connect(on.outPort[1], T2.inPort);
connect(T2.outPort, off.inPort[1]);
connect(off.activePort, booToRea2.u);
connect(booToRea1.y, y1);
connect(booToRea1.u, off.activePort);
end WSEControl;