This package contains example models to demonstrate the usage of the Modelica.Mechanics.Rotational package. Open the models and simulate them according to the provided description in the models.
Extends from Modelica.Icons.Library (Icon for library).
| Name | Description |
|---|---|
| First example: simple drive train | |
| First example: simple drive train with grounded elments | |
| Drive train with clutch and brake | |
| Drive train with 3 dynamically coupled clutches | |
| Example to show that gear efficiency may lead to stuck motion | |
| Example to show combination of LossyGear and BearingFriction | |
| Example to show possible usage of support flange | |
| Example to demonstrate backlash | |
| Demonstrate coupling Rotational - Translational |
 Modelica.Mechanics.Rotational.Examples.First
Modelica.Mechanics.Rotational.Examples.First
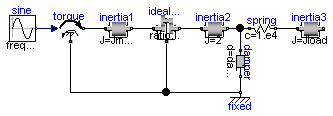
The drive train consists of a motor inertia which is driven by a sine-wave motor torque. Via a gearbox the rotational energy is transmitted to a load inertia. Elasticity in the gearbox is modeled by a spring element. A linear damper is used to model the damping in the gearbox bearing.
Note, that a force component (like the damper of this example) which is acting between a shaft and the housing has to be fixed in the housing on one side via component Fixed.
Simulate for 1 second and plot the following variables:
angular velocities of inertias inertia2 and 3: inertia2.w, inertia3.w
Extends from Modelica.Icons.Example (Icon for an example model).
| Type | Name | Default | Description |
|---|---|---|---|
| Torque | amplitude | 10 | Amplitude of driving torque [N.m] |
| Frequency | freqHz | 5 | Frequency of driving torque [Hz] |
| Inertia | Jmotor | 0.1 | Motor inertia [kg.m2] |
| Inertia | Jload | 2 | Load inertia [kg.m2] |
| Real | ratio | 10 | Gear ratio |
| Real | damping | 10 | Damping in bearing of gear |
model First "First example: simple drive train" import SI = Modelica.SIunits; extends Modelica.Icons.Example; parameter Modelica.SIunits.Torque amplitude=10 "Amplitude of driving torque"; parameter SI.Frequency freqHz=5 "Frequency of driving torque"; parameter SI.Inertia Jmotor(min=0)=0.1 "Motor inertia"; parameter SI.Inertia Jload(min=0)=2 "Load inertia"; parameter Real ratio=10 "Gear ratio"; parameter Real damping=10 "Damping in bearing of gear";Rotational.Components.Fixed fixed; Rotational.Sources.Torque torque(useSupport=true); Rotational.Components.Inertia inertia1( J=Jmotor); Rotational.Components.IdealGear idealGear( ratio=ratio, useSupport= true); Rotational.Components.Inertia inertia2( J=2, phi(fixed=true, start=0), w(fixed=true)); Rotational.Components.Spring spring( c=1.e4, phi_rel(fixed=true)); Rotational.Components.Inertia inertia3( J=Jload, w(fixed=true)); Rotational.Components.Damper damper( d=damping); Modelica.Blocks.Sources.Sine sine(amplitude=amplitude, freqHz=freqHz); equationconnect(inertia1.flange_b, idealGear.flange_a); connect(idealGear.flange_b, inertia2.flange_a); connect(inertia2.flange_b, spring.flange_a); connect(spring.flange_b, inertia3.flange_a); connect(damper.flange_a, inertia2.flange_b); connect(damper.flange_b, fixed.flange); connect(sine.y, torque.tau); connect(torque.support, fixed.flange); connect(idealGear.support, fixed.flange); connect(torque.flange, inertia1.flange_a); end First;
Modelica.Mechanics.Rotational.Examples.FirstGrounded
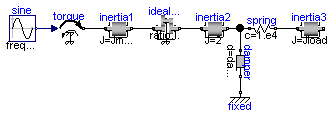
The drive train consists of a motor inertia which is driven by a sine-wave motor torque. Via a gearbox the rotational energy is transmitted to a load inertia. Elasticity in the gearbox is modeled by a spring element. A linear damper is used to model the damping in the gearbox bearing.
Note, that a force component (like the damper of this example) which is acting between a shaft and the housing has to be fixed in the housing on one side via component Fixed.
Simulate for 1 second and plot the following variables:
angular velocities of inertias inertia2 and 3: inertia2.w, inertia3.w
Extends from Modelica.Icons.Example (Icon for an example model).
| Type | Name | Default | Description |
|---|---|---|---|
| Torque | amplitude | 10 | Amplitude of driving torque [N.m] |
| Frequency | freqHz | 5 | Frequency of driving torque [Hz] |
| Inertia | Jmotor | 0.1 | Motor inertia [kg.m2] |
| Inertia | Jload | 2 | Load inertia [kg.m2] |
| Real | ratio | 10 | Gear ratio |
| Real | damping | 10 | Damping in bearing of gear |
model FirstGrounded "First example: simple drive train with grounded elments" import SI = Modelica.SIunits; extends Modelica.Icons.Example; parameter Modelica.SIunits.Torque amplitude=10 "Amplitude of driving torque"; parameter SI.Frequency freqHz=5 "Frequency of driving torque"; parameter SI.Inertia Jmotor(min=0)=0.1 "Motor inertia"; parameter SI.Inertia Jload(min=0)=2 "Load inertia"; parameter Real ratio=10 "Gear ratio"; parameter Real damping=10 "Damping in bearing of gear";Rotational.Components.Fixed fixed; Rotational.Sources.Torque torque(useSupport=false); Rotational.Components.Inertia inertia1( J=Jmotor); Rotational.Components.IdealGear idealGear(ratio=ratio, useSupport=false); Rotational.Components.Inertia inertia2( J=2, phi(fixed=true, start=0), w(fixed=true)); Rotational.Components.Spring spring( c=1.e4, phi_rel(fixed=true)); Rotational.Components.Inertia inertia3( J=Jload, w(fixed=true)); Rotational.Components.Damper damper( d=damping); Modelica.Blocks.Sources.Sine sine(amplitude=amplitude, freqHz=freqHz); equationconnect(inertia1.flange_b, idealGear.flange_a); connect(idealGear.flange_b, inertia2.flange_a); connect(inertia2.flange_b, spring.flange_a); connect(spring.flange_b, inertia3.flange_a); connect(damper.flange_a, inertia2.flange_b); connect(damper.flange_b, fixed.flange); connect(sine.y, torque.tau); connect(torque.flange, inertia1.flange_a); end FirstGrounded;
Modelica.Mechanics.Rotational.Examples.Friction
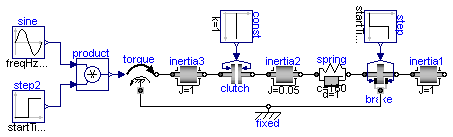
This drive train contains a frictional clutch and a brake. Simulate the system for 1 second using the following initial values (defined already in the model):
inertia1.w = 90 (or brake.w) inertia2.w = 90 inertia3.w = 100
Plot the output signals
tMotor Torque of motor tClutch Torque in clutch tBrake Torque in brake tSpring Torque in spring
as well as the absolute angular velocities of the three inertia components (inertia1.w, inertia2.w, inertia3.w).
Extends from Modelica.Icons.Example (Icon for an example model).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | startTime | 0.5 | Start time of step [s] |
model Friction "Drive train with clutch and brake" import Modelica.Constants.pi; import SI = Modelica.SIunits; extends Modelica.Icons.Example; parameter SI.Time startTime=0.5 "Start time of step"; output SI.Torque tMotor "driving torque of inertia3"; output SI.Torque tClutch "friction torque of clutch"; output SI.Torque tBrake "friction torque of brake"; output SI.Torque tSpring "spring torque";Rotational.Sources.Torque torque(useSupport=true); Rotational.Components.Inertia inertia3( J=1, phi( start=0, fixed=true, displayUnit="deg"), w(start=100, fixed=true, displayUnit="rad/s")); Rotational.Components.Clutch clutch( fn_max=160); Rotational.Components.Inertia inertia2( J=0.05, phi(start=0, fixed=true), w(start=90, fixed=true)); Rotational.Components.SpringDamper spring( c=160, d=1); Rotational.Components.Inertia inertia1( J=1, phi(start=0, fixed=true), w(start=90, fixed=true)); Rotational.Components.Brake brake( fn_max=1600, useSupport=true); Modelica.Blocks.Sources.Constant const(k=1); Modelica.Blocks.Sources.Step step(startTime=startTime); Modelica.Blocks.Sources.Step step2( height=-1, offset=1, startTime=startTime); Modelica.Blocks.Sources.Sine sine(amplitude=200, freqHz=50/pi); Modelica.Blocks.Math.Product product; Rotational.Components.Fixed fixed; equation tMotor = torque.tau; tClutch = clutch.tau; tBrake = brake.tau; tSpring = spring.tau;connect(torque.flange, inertia3.flange_a); connect(inertia3.flange_b, clutch.flange_a); connect(clutch.flange_b, inertia2.flange_a); connect(inertia2.flange_b, spring.flange_a); connect(spring.flange_b, brake.flange_a); connect(brake.flange_b, inertia1.flange_a); connect(sine.y, product.u1); connect(step2.y, product.u2); connect(product.y, torque.tau); connect(const.y, clutch.f_normalized); connect(step.y, brake.f_normalized); connect(torque.support, fixed.flange); connect(brake.support, fixed.flange); end Friction;
Modelica.Mechanics.Rotational.Examples.CoupledClutches
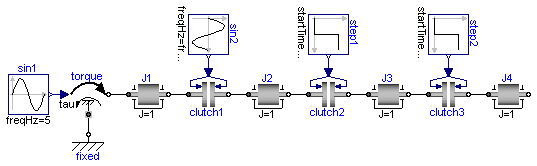
This example demonstrates how variable structure drive trains are handeled. The drive train consists of 4 inertias and 3 clutches, where the clutches are controlled by input signals. The system has 2^3=8 different configurations and 3^3 = 27 different states (every clutch may be in forward sliding, backward sliding or locked mode when the relative angular velocity is zero). By invoking the clutches at different time instances, the switching of the configurations can be studied.
Simulate the system for 1.2 seconds with the
following initial values:
J1.w = 10.
Plot the following variables:
angular velocities of inertias (J1.w, J2.w, J3.w,
J4.w), frictional torques of clutches (clutchX.tau),
frictional mode of clutches (clutchX.mode) where
mode = -1/0/+1 means backward sliding,
locked, forward sliding.
Extends from Modelica.Icons.Example (Icon for an example model).
| Type | Name | Default | Description |
|---|---|---|---|
| Frequency | freqHz | 0.2 | frequency of sine function to invoke clutch1 [Hz] |
| Time | T2 | 0.4 | time when clutch2 is invoked [s] |
| Time | T3 | 0.9 | time when clutch3 is invoked [s] |
model CoupledClutches
"Drive train with 3 dynamically coupled clutches"
import SI = Modelica.SIunits;
extends Modelica.Icons.Example;
parameter SI.Frequency freqHz=0.2
"frequency of sine function to invoke clutch1";
parameter SI.Time T2=0.4 "time when clutch2 is invoked";
parameter SI.Time T3=0.9 "time when clutch3 is invoked";
Rotational.Components.Inertia J1(
J=1,
phi(fixed=true, start=0),
w(start=10, fixed=true));
Rotational.Sources.Torque torque(useSupport=true);
Rotational.Components.Clutch clutch1( peak=1.1, fn_max=20);
Modelica.Blocks.Sources.Sine sin1(amplitude=10, freqHz=5);
Modelica.Blocks.Sources.Step step1(startTime=T2);
Rotational.Components.Inertia J2( J=1,
phi(fixed=true, start=0),
w(fixed=true));
Rotational.Components.Clutch clutch2( peak=1.1, fn_max=20);
Rotational.Components.Inertia J3( J=1,
phi(fixed=true, start=0),
w(fixed=true));
Rotational.Components.Clutch clutch3( peak=1.1, fn_max=20);
Rotational.Components.Inertia J4( J=1,
phi(fixed=true, start=0),
w(fixed=true));
Modelica.Blocks.Sources.Sine sin2(
amplitude=1,
freqHz=freqHz,
phase=1.57);
Modelica.Blocks.Sources.Step step2(startTime=T3);
Rotational.Components.Fixed fixed;
equation
connect(torque.flange, J1.flange_a);
connect(J1.flange_b, clutch1.flange_a);
connect(clutch1.flange_b, J2.flange_a);
connect(J2.flange_b, clutch2.flange_a);
connect(clutch2.flange_b, J3.flange_a);
connect(J3.flange_b, clutch3.flange_a);
connect(clutch3.flange_b, J4.flange_a);
connect(sin1.y, torque.tau);
connect(sin2.y, clutch1.f_normalized);
connect(step1.y, clutch2.f_normalized);
connect(step2.y, clutch3.f_normalized);
connect(fixed.flange, torque.support);
end CoupledClutches;
Modelica.Mechanics.Rotational.Examples.LossyGearDemo1
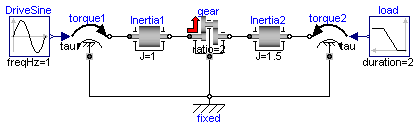
This model contains two inertias which are connected by an ideal gear where the friction between the teeth of the gear is modeled in a physical meaningful way (friction may lead to stuck mode which locks the motion of the gear). The friction is defined by an efficiency factor (= 0.5) for forward and backward driving condition leading to a torque dependent friction loss. Simulate for about 0.5 seconds. The friction in the gear will take all modes (forward and backward rolling, as well as stuck).
You may plot:
Inertia1.w,
Inertia2.w : angular velocities of inertias
powerLoss : power lost in the gear
gear.mode : 1 = forward rolling
0 = stuck (w=0)
-1 = backward rolling
Extends from Modelica.Icons.Example (Icon for an example model).
model LossyGearDemo1 "Example to show that gear efficiency may lead to stuck motion" import SI = Modelica.SIunits; extends Modelica.Icons.Example; SI.Power PowerLoss "power lost in the gear";Rotational.Components.LossyGear gear(ratio=2, lossTable=[0, 0.5, 0.5, 0, 0], useSupport=true); Rotational.Components.Inertia Inertia1(J=1); Rotational.Components.Inertia Inertia2( J=1.5, phi(fixed=true, start=0), w(fixed=true)); Rotational.Sources.Torque torque1(useSupport=true); Rotational.Sources.Torque torque2(useSupport=true); Modelica.Blocks.Sources.Sine DriveSine(amplitude=10, freqHz=1); Modelica.Blocks.Sources.Ramp load( height=5, duration=2, offset=-10); Rotational.Components.Fixed fixed; equationconnect(Inertia1.flange_b, gear.flange_a); connect(gear.flange_b, Inertia2.flange_a); connect(torque1.flange, Inertia1.flange_a); connect(torque2.flange, Inertia2.flange_b); PowerLoss = gear.flange_a.tau*der(gear.flange_a.phi) + gear.flange_b.tau* der(gear.flange_b.phi);connect(DriveSine.y, torque1.tau); connect(load.y, torque2.tau); connect(fixed.flange, gear.support); connect(fixed.flange, torque1.support); connect(fixed.flange, torque2.support); end LossyGearDemo1;
Modelica.Mechanics.Rotational.Examples.LossyGearDemo2
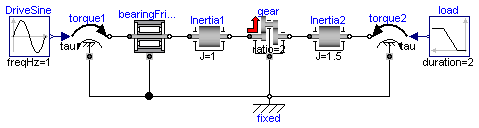
This model contains bearing friction and gear friction (= efficiency). If both friction models are stuck, there is no unique solution. Still a reliable Modelica simulator, such as Dymola, should be able to handle this situation.
Simulate for about 0.5 seconds. The friction elements are in all modes (forward and backward rolling, as well as stuck).
You may plot:
Inertia1.w,
Inertia2.w : angular velocities of inertias
powerLoss : power lost in the gear
bearingFriction.mode: 1 = forward rolling
0 = stuck (w=0)
-1 = backward rolling
gear.mode : 1 = forward rolling
0 = stuck (w=0)
-1 = backward rolling
Note: This combination of LossyGear and BearingFriction is not recommended to use, as component LossyGear includes the functionality of component BearingFriction (only peak not supported).
Extends from Modelica.Icons.Example (Icon for an example model).
model LossyGearDemo2 "Example to show combination of LossyGear and BearingFriction" import SI = Modelica.SIunits; extends Modelica.Icons.Example; SI.Power PowerLoss "power lost in the gear";Rotational.Components.LossyGear gear(ratio=2, lossTable=[0, 0.5, 0.5, 0, 0], useSupport=true); Rotational.Components.Inertia Inertia1(J=1); Rotational.Components.Inertia Inertia2( J=1.5, phi(fixed=true, start=0), w(fixed=true)); Rotational.Sources.Torque torque1(useSupport=true); Rotational.Sources.Torque torque2(useSupport=true); Modelica.Blocks.Sources.Sine DriveSine(amplitude=10, freqHz=1); Modelica.Blocks.Sources.Ramp load( height=5, duration=2, offset=-10); Rotational.Components.BearingFriction bearingFriction( tau_pos=[0, 0.5; 1, 1], useSupport=true); Rotational.Components.Fixed fixed; equation PowerLoss = gear.flange_a.tau*der(gear.flange_a.phi) + gear.flange_b.tau* der(gear.flange_b.phi);connect(torque2.flange, Inertia2.flange_b); connect(Inertia2.flange_a, gear.flange_b); connect(gear.flange_a, Inertia1.flange_b); connect(Inertia1.flange_a, bearingFriction.flange_b); connect(bearingFriction.flange_a, torque1.flange); connect(DriveSine.y, torque1.tau); connect(load.y, torque2.tau); connect(gear.support, fixed.flange); connect(fixed.flange, torque2.support); connect(fixed.flange, bearingFriction.support); connect(torque1.support, fixed.flange); end LossyGearDemo2;
Modelica.Mechanics.Rotational.Examples.ElasticBearing
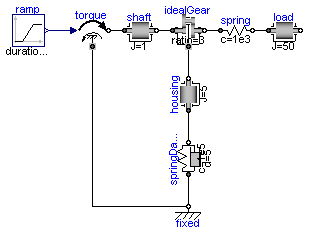
This model demonstrates the usage of the bearing flange. The gearbox is not connected rigidly to the ground, but by a spring-damper-system. This allows examination of the gearbox housing dynamics.
Simulate for about 10 seconds and plot the angular velocities of the inertias housing.w, shaft.w and load.w.
Extends from Modelica.Icons.Example (Icon for an example model).
model ElasticBearing "Example to show possible usage of support flange" extends Modelica.Icons.Example;Rotational.Components.Inertia shaft( phi(fixed=true, start=0), w( fixed=true), J=1); Rotational.Components.Inertia load( J=50, w(fixed=true)); Rotational.Components.Spring spring( c=1e3, phi_rel(fixed=true)); Rotational.Components.Fixed fixed; Rotational.Components.SpringDamper springDamper( c=1e5, d=5, phi_rel(fixed=true), w_rel(fixed=true)); Rotational.Sources.Torque torque(useSupport=true); Modelica.Blocks.Sources.Ramp ramp( duration=5, height=100); Rotational.Components.IdealGear idealGear( ratio=3, useSupport= true); Rotational.Components.Inertia housing( J=5); equationconnect(torque.flange, shaft.flange_a); connect(spring.flange_b, load.flange_a); connect(springDamper.flange_a, fixed.flange); connect(shaft.flange_b, idealGear.flange_a); connect(idealGear.flange_b, spring.flange_a); connect(idealGear.support, housing.flange_b); connect(housing.flange_a, springDamper.flange_b); connect(ramp.y, torque.tau); connect(fixed.flange, torque.support); end ElasticBearing;
Modelica.Mechanics.Rotational.Examples.Backlash
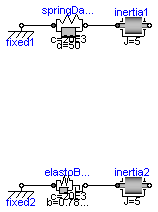
This model demonstrates the effect of a backlash on eigenfrequency, and also that the damping torque does not lead to unphysical pulling torques (since the ElastoBacklash model takes care of it).
Extends from Modelica.Icons.Example (Icon for an example model).
model Backlash "Example to demonstrate backlash" extends Modelica.Icons.Example;Rotational.Components.Fixed fixed1; Rotational.Components.SpringDamper springDamper(c=20E3, d=50, phi_nominal=1); Rotational.Components.Inertia inertia1(J=5, w(fixed=true, start=0), phi( fixed=true, displayUnit="deg", start=1.570796326794897)); Rotational.Components.Fixed fixed2; Rotational.Components.ElastoBacklash elastoBacklash( c=20E3, d=50, b(displayUnit="deg") = 0.7853981633974483, phi_nominal=1); Rotational.Components.Inertia inertia2(J=5, w(fixed=true, start=0), phi( fixed=true, start=1.570796326794897, displayUnit="deg")); equationconnect(springDamper.flange_b, inertia1.flange_a); connect(elastoBacklash.flange_b, inertia2.flange_a); connect(fixed1.flange, springDamper.flange_a); connect(fixed2.flange, elastoBacklash.flange_a); end Backlash;
Modelica.Mechanics.Rotational.Examples.RollingWheel
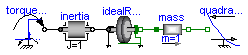
This model demonstrates the coupling between rotational and translational components:
A torque (step) accelerates both the inertia (of the wheel) and the mass (of the vehicle).
Du to a speed dependent force (like driving resistance), we find an eqilibrium at 5 m/s after approx. 5 s.
Extends from Modelica.Icons.Example (Icon for an example model).
model RollingWheel "Demonstrate coupling Rotational - Translational" extends Modelica.Icons.Example;Rotational.Components.IdealRollingWheel idealRollingWheel(radius=1); Rotational.Components.Inertia inertia(J=1); Rotational.Sources.TorqueStep torqueStep( stepTorque=10, offsetTorque=0, startTime=0.1, useSupport=false); Translational.Components.Mass mass(L=0, m=1); Translational.Sources.QuadraticSpeedDependentForce quadraticSpeedDependentForce( f_nominal=-10, ForceDirection=false, v_nominal=5); equationconnect(torqueStep.flange, inertia.flange_a); connect(inertia.flange_b, idealRollingWheel.flangeR); connect(idealRollingWheel.flangeT, mass.flange_a); connect(quadraticSpeedDependentForce.flange, mass.flange_b); end RollingWheel;