Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation
Collection of validation models
Information
This package contains validation models for the classes in Buildings.Obsolete.Controls.OBC.CDL.Continuous.
Note that most validation models contain simple input data which may not be realistic, but for which the correct output can be obtained through an analytic solution. The examples plot various outputs, which have been verified against these solutions. These model outputs are stored as reference data and used for continuous validation whenever models in the library change.
Extends from Modelica.Icons.ExamplesPackage (Icon for packages containing runnable examples).
Package Content
| Name | Description |
|---|---|
| Validation model for the ChangeSign block | |
| Validation model for the Derivative block | |
| Validation model for the GreaterEqual block | |
| Validation model for the GreaterEqualThreshold block | |
| Validation model for the HysteresisWithHold block | |
| Validation model for the LessEqual block | |
| Validation model for the LessEqualThreshold block | |
| Test model for LimPID controller | |
| Test model for LimPID controller with initial output specified | |
| Test model for LimPID controller with initial state specified | |
| Test model for LimPID controller with reset trigger | |
| Validation model for the NumberOfRequests block |
 Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.ChangeSign
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.ChangeSign
Validation model for the ChangeSign block
Information
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.ChangeSign.
The input u varies from -1.5 to +1.5.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.Derivative
Validation model for the Derivative block
Information
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.Derivative.
The input u varies from 0.0 to +5*6.283.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.GreaterEqual
Validation model for the GreaterEqual block
Information
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.GreaterEqual.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.GreaterEqualThreshold
Validation model for the GreaterEqualThreshold block
Information
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.GreaterEqualThreshold.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.HysteresisWithHold
Validation model for the HysteresisWithHold block
Information
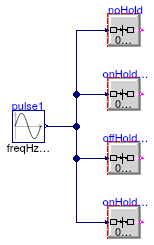
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.HysteresisWithHold.
The hold durations are configured as follows:
-
truehold duration timetrueHoldDuration=0,falsehold duration timefalseHoldDuration=0. -
truehold duration timetrueHoldDuration=30,falsehold duration timefalseHoldDuration=30. -
truehold duration timetrueHoldDuration=30,falsehold duration timefalseHoldDuration=300. Thefalsehold period covers the instance when it should be on. -
truehold duration timetrueHoldDuration=150,falsehold duration timefalseHoldDuration=30. Thetruehold period covers the instance when it should be off.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.LessEqual
Validation model for the LessEqual block
Information
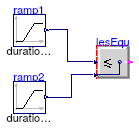
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.LessEqual.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.LessEqualThreshold
Validation model for the LessEqualThreshold block
Information
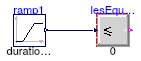
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.LessEqualThreshold.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.LimPID
Test model for LimPID controller
Information
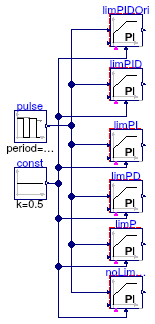
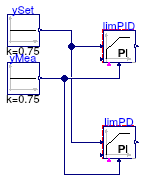
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.LimPID.
The model limPIDOri is the original
implementation of the controller from the Modelica
Standard Library. The models limPID
is the implementations from the Buildings library.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.LimPIDInitialDerivativeOutput
Test model for LimPID controller with initial output specified
Information
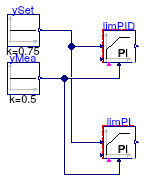
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.LimPID.
This model validates setting the initial output of the controller to a specified value. Note that the control error must be zero for the initial output to be at the specified value. See the description of Buildings.Obsolete.Controls.OBC.CDL.Continuous.LimPID.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.LimPIDInitialState
Test model for LimPID controller with initial state specified
Information
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.LimPID.
This model validates setting the initial state of the controller to a specified value.
The model sets the initial values xi_start=0.25
of the integrator for both instances of the controller.
For the instance limPID, it also sets the initial value of the state of the
derivative block xd_start=-0.5.
The derivative block obtains as an input signal the value
u=-0.5 because the set point weight for the derivative action is wd=0.
Therefore, an initial state of x(t0)=-0.5 causes the state of the derivative
block to be at steady-state, because
dx(t)/dt = (u - x)/T.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.LimPIDWithReset
Test model for LimPID controller with reset trigger
Information
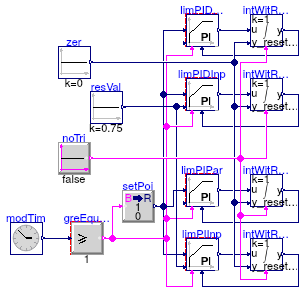
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.LimPID.
This model validates the controller for different settings of the control output reset.
Modelica definition
Buildings.Obsolete.Controls.OBC.CDL.Continuous.Validation.NumberOfRequests
Validation model for the NumberOfRequests block
Information
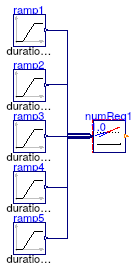
Validation test for the block Buildings.Obsolete.Controls.OBC.CDL.Continuous.NumberOfRequests.
The input u1 varies from -2 to +2, input u2 varies from -1 to +2,
input u3 varies from +2 to -2, input u4 varies from +3 to +2,
input u5 varies from 0 to +4,