Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences
Subsequences for economizer control
Information
This package contains subsequences for multi zone VAV AHU economizer control.
Package Content
| Name | Description |
|---|---|
| Multi zone VAV AHU economizer enable/disable switch | |
| Multi zone VAV AHU minimum outdoor air control - damper position limits | |
| Outdoor and return air damper position modulation sequence for multi zone VAV AHU | |
| Collection of validation models |
 Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Enable
Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Enable
Multi zone VAV AHU economizer enable/disable switch
Information
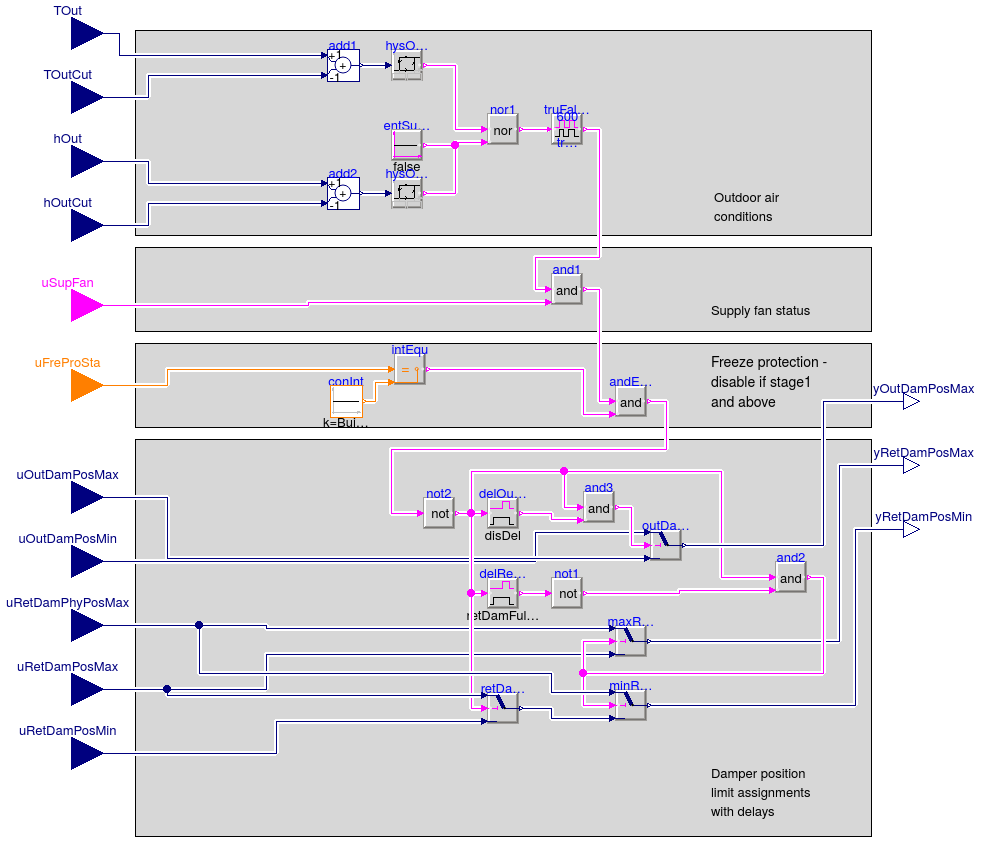
This is a multi zone VAV AHU economizer enable/disable sequence based on ASHRAE G36 PART5.N.7 and PART5.A.17. Additional conditions included in the sequence are: freeze protection (freeze protection stage 0-3, see PART5.N.12), supply fan status (on or off, see PART5.N.5).
The economizer is disabled whenever the outdoor air conditions exceed the economizer high limit setpoint. This sequence allows for all device types listed in ASHRAE 90.1-2013 and Title 24-2013.
In addition, the economizer gets disabled without a delay whenever any of the
following is true:
-
The supply fan is off (
uSupFan = false), -
the freeze protection stage
Buildings.Controls.OBC.ASHRAE.G36_PR1.Types.FreezeProtectionStages
is not
stage0.
The following state machine chart illustrates the transitions between enabling and disabling:
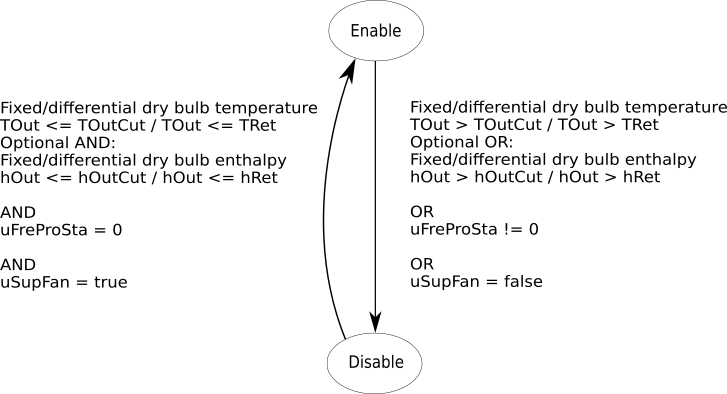
After the disable signal is activated, the following procedure is applied, per PART5.N.7.d, in order to prevent pressure fluctuations in the HVAC system:
-
The return damper gets fully opened (
yRetDamPosMax = uRetDamPhyPosMaxandyRetDamPosMin = uRetDamPhyPosMax) forretDamFulOpeTimtime period, after which the return damper gets released to its minimum outdoor airflow control position (yRetDamPosMax = uRetDamPosMaxandyRetDamPosMin = uRetDamPosMax). -
The outdoor air damper is closed to its minimum outoor airflow control limit (
yOutDamPosMax = uOutDamPosMin) after adisDeltime delay.
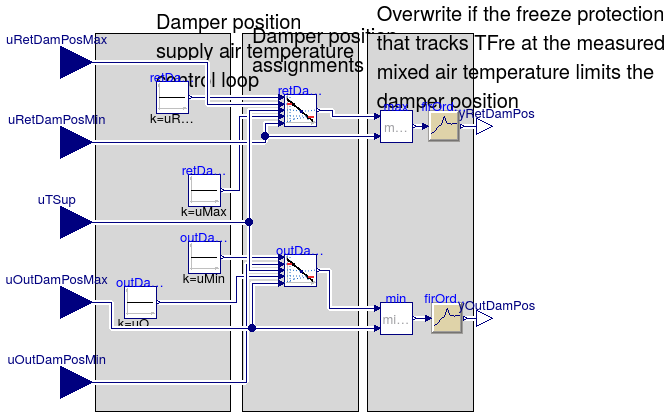
This sequence also has an overwrite of the damper positions to track
a minimum mixed air temperature of TFreSet, which is
by default set to 4°C (39.2 F).
This is implemented using a proportional controller with a default deadband of
1 K, which can be adjusted using the parameter kPFrePro.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Conditional | |||
| Boolean | use_enthalpy | true | Set to true to evaluate outdoor air enthalpy in addition to temperature |
| Advanced | |||
| Hysteresis | |||
| TemperatureDifference | delTOutHis | 1 | Delta between the temperature hysteresis high and low limit [K] |
| SpecificEnergy | delEntHis | 1000 | Delta between the enthalpy hysteresis high and low limits [J/kg] |
| Delays at disable | |||
| Time | retDamFulOpeTim | 180 | Time period to keep RA damper fully open before releasing it for minimum outdoor airflow control at disable to avoid pressure fluctuations [s] |
| Time | disDel | 15 | Short time delay before closing the OA damper at disable to avoid pressure fluctuations [s] |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | TOut | Outdoor air temperature [K] |
| input RealInput | hOut | Outdoor air enthalpy [J/kg] |
| input RealInput | TOutCut | OA temperature high limit cutoff. For differential dry bulb temeprature condition use return air temperature measurement [K] |
| input RealInput | hOutCut | OA enthalpy high limit cutoff. For differential enthalpy use return air enthalpy measurement [J/kg] |
| input RealInput | uOutDamPosMin | Minimum outdoor air damper position, output from damper position limits sequence [1] |
| input RealInput | uOutDamPosMax | Maximum outdoor air damper position, output from damper position limits sequence [1] |
| input RealInput | uRetDamPosMax | Maximum return air damper position, output from damper position limits sequence [1] |
| input RealInput | uRetDamPosMin | Minimum return air damper position, output from damper position limits sequence [1] |
| input RealInput | uRetDamPhyPosMax | Physical maximum return air damper position, output from damper position limits sequence [1] |
| input BooleanInput | uSupFan | Supply fan on/off status signal |
| input IntegerInput | uFreProSta | Freeze protection stage status signal |
| output RealOutput | yOutDamPosMax | Maximum outdoor air damper position [1] |
| output RealOutput | yRetDamPosMin | Minimum return air damper position [1] |
| output RealOutput | yRetDamPosMax | Maximum return air damper position [1] |
Modelica definition
 Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Limits
Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Limits
Multi zone VAV AHU minimum outdoor air control - damper position limits
Information
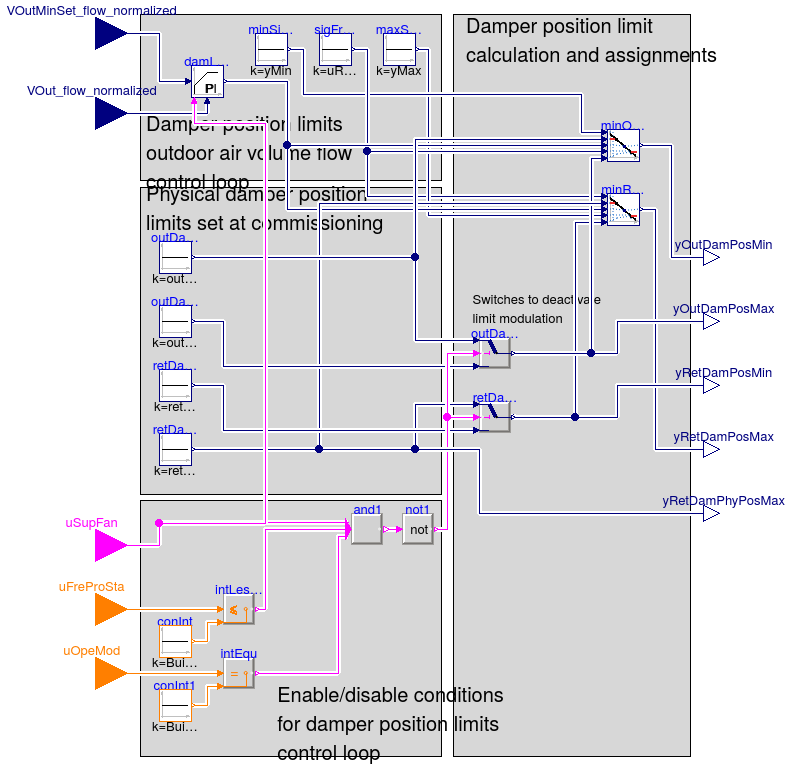
This block models the multi zone VAV AHU minimum outdoor air control with a single common damper for minimum outdoor air and economizer functions based on outdoor airflow measurement, designed in line with ASHRAE Guidline 36 (G36), PART5.N.6.c.
The controller is enabled when the supply fan is proven on (uSupFan=true),
the AHU operation mode
Buildings.Controls.OBC.ASHRAE.G36_PR1.Types.OperationModes equals occupied,
and the freeze protection stage
Buildings.Controls.OBC.ASHRAE.G36_PR1.Types.FreezeProtectionStages is stage1 or lower.
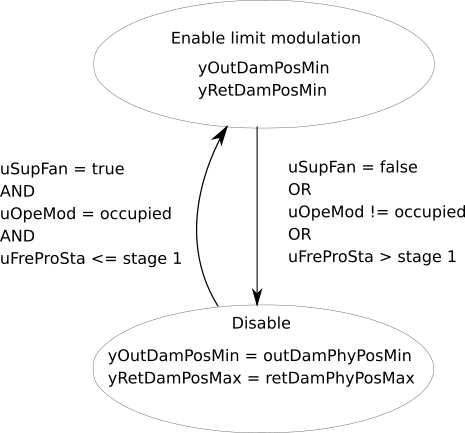
Otherwise the damper position limits are set to their corresponding maximum and minimum physical or at
commissioning fixed limits. The state machine chart below illustrates listed conditions:
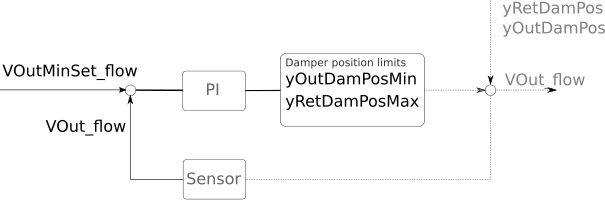
The controller sets the outdoor and return damper position limits so
that the outdoor airflow rate VOut_flow stays equal or above the
minimum outdoor air setpoint VOutMinSet_flow. The fraction of the controller
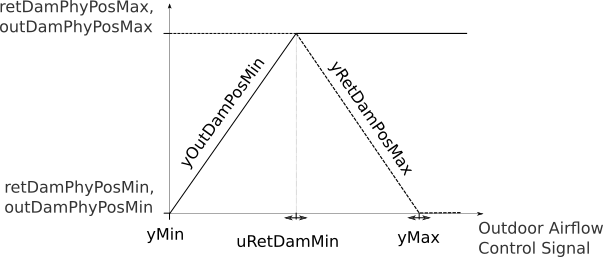
output signal between yMin and uRetDamMin is
linearly mapped to the outdoor air damper minimal position yOutDamPosMin
while the fraction of the controller output between uRetDamMin and
yMax is linearly mapped to the return air damper maximum position
yRetDamPosMax. Thus the dampers are not interlocked.
The following control charts show the input/output structure and an expected damper position limits for a well configured controller.
The expected damper position limits vs. the control loop signal are as follows:
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Controller | |||
| SimpleController | controllerType | Buildings.Controls.OBC.CDL.T... | Type of controller |
| Real | k | 0.05 | Gain of damper limit controller [1] |
| Time | Ti | 1200 | Time constant of damper limit controller integrator block [s] |
| Time | Td | 0.1 | Time constant of damper limit controller derivative block [s] |
| Commissioning | |||
| Controller | |||
| Real | uRetDamMin | 0.5 | Minimum control signal for the return air damper position limit [1] |
| Physical damper position limits | |||
| Real | retDamPhyPosMax | 1 | Physically fixed maximum position of the return air damper [1] |
| Real | retDamPhyPosMin | 0 | Physically fixed minimum position of the return air damper [1] |
| Real | outDamPhyPosMax | 1 | Physically fixed maximum position of the outdoor air damper [1] |
| Real | outDamPhyPosMin | 0 | Physically fixed minimum position of the outdoor air damper [1] |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | VOut_flow_normalized | Measured outdoor volumetric airflow rate, normalized by design minimum outdoor airflow rate [1] |
| input RealInput | VOutMinSet_flow_normalized | Effective minimum outdoor airflow setpoint, normalized by design minimum outdoor airflow rate [1] |
| input IntegerInput | uOpeMod | AHU operation mode status signal |
| input IntegerInput | uFreProSta | Freeze protection status signal |
| input BooleanInput | uSupFan | Supply fan status signal |
| output RealOutput | yOutDamPosMin | Minimum outdoor air damper position limit [1] |
| output RealOutput | yOutDamPosMax | Maximum outdoor air damper position limit [1] |
| output RealOutput | yRetDamPosMin | Minimum return air damper position limit [1] |
| output RealOutput | yRetDamPosMax | Maximum return air damper position limit [1] |
| output RealOutput | yRetDamPhyPosMax | Physical maximum return air damper position limit. Required as an input for the economizer enable disable sequence [1] |
Modelica definition
 Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Modulation
Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Modulation
Outdoor and return air damper position modulation sequence for multi zone VAV AHU
Information
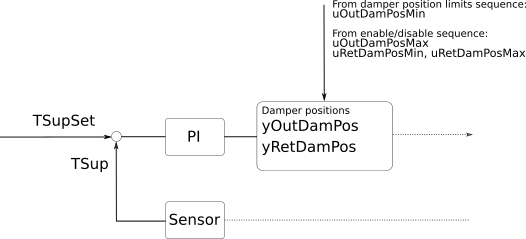
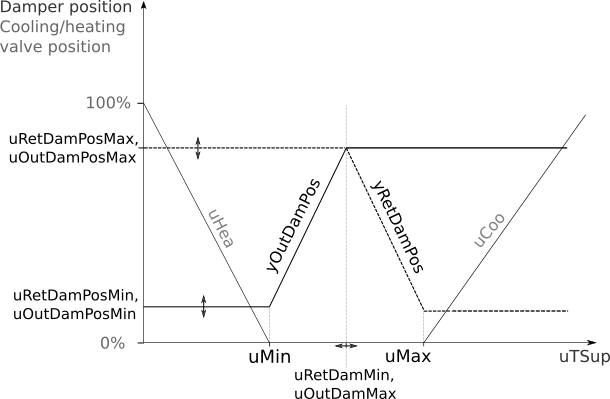
This is a multi zone VAV AHU economizer modulation block. It calculates the outdoor and return air damper positions based on the supply air temperature control loop signal. The implementation is in line with ASHRAE Guidline 36 (G36), PART5.N.2.c. Damper positions are linearly mapped to the supply air control loop signal. This is a final sequence in the composite multi zone VAV AHU economizer control sequence. Damper position limits, which are the inputs to the sequence, are the outputs of Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Limits and Buildings.Controls.OBC.ASHRAE.G36_PR1.AHUs.MultiZone.Economizers.Subsequences.Enable sequences.
When the economizer is enabled, the PI controller modulates the damper positions. Return and outdoor damper are not interlocked. When the economizer is disabled, the damper positions are set to the minimum outdoor air damper position limits.
The time rate of change of the damper signals is limited by a first order hold,
using the sample time samplePeriod.
This prevents a quick opening of the outdoor air damper, for example when the
outdoor airflow setpoint has a step change.
Slowing down the opening of the outdoor air damper allows the freeze protection
to componensate with its dynamics that is faster than the opening of the outdoor air damper.
To avoid that all dampers are closed, the return air damper has the same
time rate of change limitation.
The control charts below show the input-output structure and an economizer damper modulation sequence assuming a well configured controller. Control diagram:
Multi zone AHU economizer modulation control chart:
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Time | samplePeriod | 300 | Sample period of component, used to limit the rate of change of the dampers (to avoid quick opening that can result in frost) [s] |
| Commissioning | |||
| Controller | |||
| Real | uMin | -0.25 | Lower limit of controller input when outdoor damper opens (see diagram) [1] |
| Real | uMax | +0.25 | Upper limit of controller input when return damper is closed (see diagram) [1] |
| Real | uOutDamMax | (uMin + uMax)/2 | Maximum loop signal for the OA damper to be fully open [1] |
| Real | uRetDamMin | (uMin + uMax)/2 | Minimum loop signal for the RA damper to be fully open [1] |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | uTSup | Signal for supply air temperature control (T Sup Control Loop Signal in diagram) [1] |
| input RealInput | uOutDamPosMin | Minimum economizer damper position limit as returned by the damper position limits sequence [1] |
| input RealInput | uOutDamPosMax | Maximum economizer damper position limit as returned by the economizer enable-disable sequence. If the economizer is disabled, this value equals uOutDamPosMin [1] |
| input RealInput | uRetDamPosMin | Minimum return air damper position limit as returned by the economizer enable-disable sequence [1] |
| input RealInput | uRetDamPosMax | Maximum return air damper position limit as returned by the economizer enable-disable sequence [1] |
| output RealOutput | yOutDamPos | Economizer damper position [1] |
| output RealOutput | yRetDamPos | Return air damper position [1] |