Package of example models for communication with FLEXLAB using the CalBay interface
Information
This package contains a sample model demonstrating the use of Dymola
and a Python script to enable hardware-in-the-loop simulation.
Extends from Modelica.Icons.ExamplesPackage (Icon for packages containing runnable examples).
Package Content
| Name |
Description |
 CalBayComm CalBayComm
|
Model calling a Python script to communicate with the CalBay adapter |
Model calling a Python script to communicate with the CalBay adapter
Information
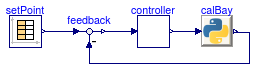
This example demonstrates how a Python script and model of a controller
can be used to control experiments in the FLEXLAB test cells. It uses
an instance of
Buildings.Utilities.IO.Python27.Real_Real to communicate with the
CalBay adapter. The Python script is located at
Buildings/Resources/Python-Sources/CalBayComm.py. The script must be
edited before it will effectively communicate with the CalBay adapter.
The necessary changes include:
- The script currently does not have valid login or password credentials.
The credentials will have to be replaced before communication with the
CalBay adapter will succeed.
- To avoid accidental manipulation of controls, the script currently does
not include effective commands. The desired commands must be added to the
program before it will have any effect.
More details describing the necessary changes to the script are provided in
the documentation of the script itself.
Note:
This model is marked as under construction because the
application programming interface for data exchange with the CalBay adaptor
of FLEXLAB has not yet been finalized.
The model works, however, with the CalBay infrastructure as of October 2013.
Extends from Modelica.Icons.Example (Icon for runnable examples), Modelica.Icons.UnderConstruction (Icon for classes that are still under construction).
Parameters
| Type | Name | Default | Description |
|---|
| Time | samplePeriod | 30 | Sample period for communication [s] |
Modelica definition
model CalBayComm
"Model calling a Python script to communicate with the CalBay adapter"
extends Modelica.Icons.Example;
extends Modelica.Icons.UnderConstruction;
parameter Modelica.SIunits.Time samplePeriod = 30
"Sample period for communication";
Modelica.Blocks.Sources.CombiTimeTable setPoint(
tableOnFile=false,
extrapolation=Modelica.Blocks.Types.Extrapolation.Periodic,
smoothness=Modelica.Blocks.Types.Smoothness.ConstantSegments,
table=[ -1,12;
119,6;
239,8;
359,9;
479,10;
599,12])
"Setpoint for lights";
Utilities.IO.Python27.Real_Real calBay(
functionName="CalBayComm",
nDblWri=1,
nDblRea=2,
moduleName="CalBayComm",
final samplePeriod=samplePeriod)
"Interface to CalBay communication";
Modelica.Blocks.Math.Feedback feedback
"Control error";
lightingController controller(
final samplePeriod=samplePeriod)
"Controller for light level";
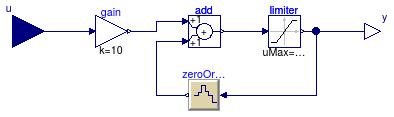
block lightingController
"Block for control law"
extends Modelica.Blocks.Interfaces.SISO;
parameter Modelica.SIunits.Time samplePeriod
"Sample period of component";
Modelica.Blocks.Math.Gain gain(k=10);
Modelica.Blocks.Nonlinear.Limiter limiter(uMax=100, uMin=1)
"Output limiter to constrain control signal";
Modelica.Blocks.Math.Add add;
Modelica.Blocks.Discrete.ZeroOrderHold zeroOrderHold(
final samplePeriod=samplePeriod)
"Zero order hold for feedback";
equation
connect(limiter.y, y);
connect(add.y, limiter.u);
connect(limiter.y, zeroOrderHold.u);
connect(zeroOrderHold.y, add.u2);
connect(gain.y, add.u1);
connect(u, gain.u);
end lightingController;
equation
connect(setPoint.y[1], feedback.u1);
connect(calBay.yR[1], feedback.u2);
connect(controller.y, calBay.uR[1]);
connect(feedback.y, controller.u);
end CalBayComm;
Block for control law
Information
Extends from Modelica.Blocks.Interfaces.SISO (Single Input Single Output continuous control block).
Parameters
| Type | Name | Default | Description |
|---|
| Time | samplePeriod | | Sample period of component [s] |
Connectors
| Type | Name | Description |
|---|
| input RealInput | u | Connector of Real input signal |
| output RealOutput | y | Connector of Real output signal |
Modelica definition
Automatically generated Mon Jul 13 14:30:45 2015.
 Buildings.Utilities.IO.FLEXLAB.CalBayComm
Buildings.Utilities.IO.FLEXLAB.CalBayComm Buildings.Utilities.IO.FLEXLAB.CalBayComm.lightingController
Buildings.Utilities.IO.FLEXLAB.CalBayComm.lightingController