Buildings.Fluid.HeatExchangers.ThermalWheels.Latent
Package with enthalpy recovery wheels
Information
This package contains component models for enthalpy recovery wheels.
Extends from Modelica.Icons.Package (Icon for standard packages).
Package Content
| Name | Description |
|---|---|
| Enthalpy recovery wheel with bypass dampers | |
| Enthalpy recovery wheel with a variable speed drive | |
| Collection of models that illustrate model use and test models | |
| Collection of validation models | |
| Package with base classes for enthalpy recovery devices |
 Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.BypassDampers
Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.BypassDampers
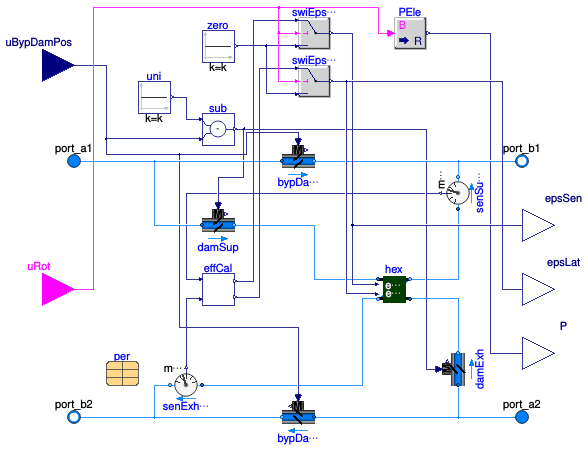
Enthalpy recovery wheel with bypass dampers
Information
Model of an enthalpy recovery wheel, which consists of a heat exchanger and two dampers to bypass the supply and exhaust airflow.
This model does not require geometric data. The performance is defined by specifying the part load (75% of the nominal supply flow rate) and nominal sensible and latent heat exchanger effectiveness. This operation of the wheel is configured as follows.
-
If the operating signal
uRot=true,- The wheel power consumption is constant and equal to the nominal value.
- The heat exchange in the heat recovery wheel is adjustable via bypassing supply/exhaust air through the heat exchanger. Accordingly, the sensible and latent heat exchanger effectiveness are calculated with Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.BaseClasses.Effectiveness.
-
Otherwise,
- The wheel power consumption is 0.
- In addition, there is no sensible or latent heat transfer, i.e., the sensible and latent effectiveness of the heat recovery wheel is 0.
Extends from Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.BaseClasses.PartialWheel (Partial model for enthalpy recovery wheel).
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| replaceable package Medium | PartialCondensingGases | Air | |
| Generic | per | Record with performance data | |
| PressureDifference | dpDamper_nominal | 20 | Nominal pressure drop of dampers [Pa] |
| Assumptions | |||
| Boolean | allowFlowReversal1 | true | = false to simplify equations, assuming, but not enforcing, no flow reversal for medium 1 |
| Boolean | allowFlowReversal2 | true | = false to simplify equations, assuming, but not enforcing, no flow reversal for medium 2 |
| Flow resistance | |||
| Medium 1 | |||
| Boolean | from_dp1 | true | = true, use m_flow = f(dp) else dp = f(m_flow) |
| Boolean | linearizeFlowResistance1 | false | = true, use linear relation between m_flow and dp for any flow rate |
| Medium 2 | |||
| Boolean | from_dp2 | true | = true, use m_flow = f(dp) else dp = f(m_flow) |
| Boolean | linearizeFlowResistance2 | false | = true, use linear relation between m_flow and dp for any flow rate |
| Dynamics | |||
| Actuator position | |||
| Boolean | use_strokeTime | true | Set to true to continuously open and close valve using strokeTime |
| Time | strokeTime | 120 | Time needed to fully open or close actuator [s] |
| Init | init | Modelica.Blocks.Types.Init.I... | Type of initialization of dampers (no init/steady state/initial state/initial output) |
| Real | yByp_start | 1 | Initial position of bypass actuators |
Connectors
| Type | Name | Description |
|---|---|---|
| output RealOutput | P | Electric power consumption [W] |
| output RealOutput | epsSen | Sensible heat exchanger effectiveness [1] |
| output RealOutput | epsLat | Latent heat exchanger effectiveness [1] |
| FluidPort_a | port_a1 | Fluid connector a1 of the supply air (positive design flow direction is from port_a1 to port_b1) |
| FluidPort_b | port_b2 | Fluid connector b2 of the exhaust air (positive design flow direction is from port_a2 to port_b2) |
| FluidPort_b | port_b1 | Fluid connector b1 of the supply air (positive design flow direction is from port_a1 to port_b1) |
| FluidPort_a | port_a2 | Fluid connector a2 of the exhaust air (positive design flow direction is from port_a2 to port_b2) |
| input RealInput | uBypDamPos | Bypass damper position [1] |
| input BooleanInput | uRot | True when the wheel is operating |
Modelica definition
 Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.SpeedControlled
Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.SpeedControlled
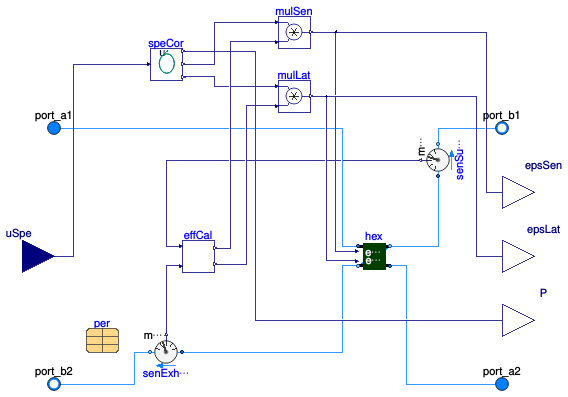
Enthalpy recovery wheel with a variable speed drive
Information
Model of an enthalpy recovery wheel, which has the wheel speed as the input to control the heat recovery.
This model does not require geometric data. The performance is defined by specifying the part load (75% of the nominal supply flow rate) and nominal sensible and latent heat exchanger effectiveness.
The operation of the heat recovery wheel is adjustable by modulating the wheel speed. See details about the impacts of the wheel speed in Buildings.Fluid.HeatExchangers.ThermalWheels.BaseClasses.SpeedCorrectionLatent.
Extends from Buildings.Fluid.HeatExchangers.ThermalWheels.Latent.BaseClasses.PartialWheel (Partial model for enthalpy recovery wheel).
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| replaceable package Medium | PartialCondensingGases | Air | |
| Generic | per | Record with performance data | |
| Assumptions | |||
| Boolean | allowFlowReversal1 | true | = false to simplify equations, assuming, but not enforcing, no flow reversal for medium 1 |
| Boolean | allowFlowReversal2 | true | = false to simplify equations, assuming, but not enforcing, no flow reversal for medium 2 |
| Flow resistance | |||
| Medium 1 | |||
| Boolean | from_dp1 | false | = true, use m_flow = f(dp) else dp = f(m_flow) |
| Boolean | linearizeFlowResistance1 | false | = true, use linear relation between m_flow and dp for any flow rate |
| Medium 2 | |||
| Boolean | from_dp2 | false | = true, use m_flow = f(dp) else dp = f(m_flow) |
| Boolean | linearizeFlowResistance2 | false | = true, use linear relation between m_flow and dp for any flow rate |
Connectors
| Type | Name | Description |
|---|---|---|
| output RealOutput | P | Electric power consumption [W] |
| output RealOutput | epsSen | Sensible heat exchanger effectiveness [1] |
| output RealOutput | epsLat | Latent heat exchanger effectiveness [1] |
| FluidPort_a | port_a1 | Fluid connector a1 of the supply air (positive design flow direction is from port_a1 to port_b1) |
| FluidPort_b | port_b2 | Fluid connector b2 of the exhaust air (positive design flow direction is from port_a2 to port_b2) |
| FluidPort_b | port_b1 | Fluid connector b1 of the supply air (positive design flow direction is from port_a1 to port_b1) |
| FluidPort_a | port_a2 | Fluid connector a2 of the exhaust air (positive design flow direction is from port_a2 to port_b2) |
| input RealInput | uSpe | Wheel speed ratio [1] |