| Name | Description |
|---|---|
| Direct on line start of asynchronous induction machine with squirrel cage | |
| Starting of asynchronous induction machine with slip rings | |
| Starting of permanent magnet synchronous machine with inverter | |
| Electrical excited synchronous machine operating as generator | |
| Starting of synchronous reluctance machine with inverter |
 Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.AIMC_DOL
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.AIMC_DOL
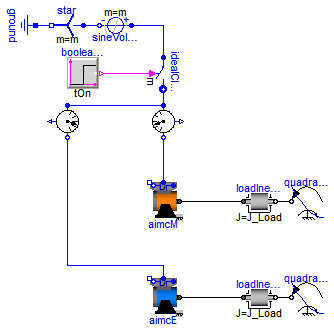
At start time tStart three phase voltage is supplied to the asynchronous induction machine with squirrel cage. The machine starts from standstill, accelerating inertias against load torque quadratic dependent on speed, finally reaching nominal speed.
Simulate for 1.5 seconds and plot (versus time):
currentRMSsensorM|E.I: equivalent RMS stator currentaimcM|E.wMechanical: machine speedaimcM|E.tauElectrical: machine torqueExtends from Modelica.Icons.Example (Icon for runnable examples).
| Type | Name | Default | Description |
|---|---|---|---|
| Voltage | VsNominal | 100 | Nominal RMS voltage per phase [V] |
| Frequency | fsNominal | 50 | Nominal frequency [Hz] |
| Time | tOn | 0.1 | Start time of machine [s] |
| Torque | T_Load | 161.4 | Nominal load torque [N.m] |
| AngularVelocity | w_Load | 1440.45*2*Modelica.Constants... | Nominal load speed [rad/s] |
| Inertia | J_Load | 0.29 | Load inertia [kg.m2] |
| Integer | p | 2 | Number of pole pairs |
| Resistance | Rs | 0.03 | Stator resistance per phase [Ohm] |
| Inductance | Lssigma | 3*(1 - sqrt(1 - 0.0667))/(2*... | Stator stray inductance per phase [H] |
| Inductance | Lm | 3*sqrt(1 - 0.0667)/(2*Modeli... | Main field inductance [H] |
| Inductance | Lrsigma | 3*(1 - sqrt(1 - 0.0667))/(2*... | Rotor stray inductance (equivalent three phase winding) [H] |
| Resistance | Rr | 0.04 | Rotor resistance (equivalent three phase winding) [Ohm] |
model AIMC_DOL
"Direct on line start of asynchronous induction machine with squirrel cage"
extends Modelica.Icons.Example;
constant Integer m=3 "Number of phases";
parameter Modelica.SIunits.Voltage VsNominal=100
"Nominal RMS voltage per phase";
parameter Modelica.SIunits.Frequency fsNominal=50 "Nominal frequency";
parameter Modelica.SIunits.Time tOn=0.1 "Start time of machine";
parameter Modelica.SIunits.Torque T_Load=161.4 "Nominal load torque";
parameter Modelica.SIunits.AngularVelocity w_Load(displayUnit="1/min")=1440.45*2*Modelica.Constants.pi/60
"Nominal load speed";
parameter Modelica.SIunits.Inertia J_Load=0.29 "Load inertia";
parameter Integer p = 2 "Number of pole pairs";
parameter Modelica.SIunits.Resistance Rs=0.03 "Stator resistance per phase";
parameter Modelica.SIunits.Inductance Lssigma=3*(1 - sqrt(1 - 0.0667))/(2*Modelica.Constants.pi*fsNominal)
"Stator stray inductance per phase";
parameter Modelica.SIunits.Inductance Lm=3*sqrt(1 - 0.0667)/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance";
parameter Modelica.SIunits.Inductance Lrsigma=3*(1 - sqrt(1 - 0.0667))/(2*Modelica.Constants.pi*fsNominal)
"Rotor stray inductance (equivalent three phase winding)";
parameter Modelica.SIunits.Resistance Rr=0.04
"Rotor resistance (equivalent three phase winding)";
Modelica.Electrical.Analog.Basic.Ground ground;
Modelica.Electrical.MultiPhase.Basic.Star star(final m=m);
Modelica.Electrical.MultiPhase.Sources.SineVoltage sineVoltage(
final m=m,
freqHz=fill(fsNominal, m),
V=fill(sqrt(2.0/3.0)*VsNominal, m));
Electrical.MultiPhase.Ideal.IdealClosingSwitch idealCloser(final m=m);
Blocks.Sources.BooleanStep booleanStep[m](
each startTime=tOn, each startValue=false);
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorM;
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorE;
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxM(
terminalConnection="D");
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxE(
terminalConnection="D");
Modelica.Magnetic.FundamentalWave.BasicMachines.AsynchronousInductionMachines.AIM_SquirrelCage
aimcM(
p=p,
Rs=Rs,
Lssigma=Lssigma,
Lm=Lm,
Lrsigma=Lrsigma,
Rr=Rr,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Modelica.Electrical.Machines.BasicMachines.AsynchronousInductionMachines.AIM_SquirrelCage
aimcE(
p=p,
Rs=Rs,
Lssigma=Lssigma,
Lm=Lm,
Lrsigma=Lrsigma,
Rr=Rr,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaM(
J=J_Load);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaE(J=J_Load);
Modelica.Mechanics.Rotational.Sources.QuadraticSpeedDependentTorque
quadraticLoadTorqueM(
w_nominal=w_Load,
tau_nominal=-T_Load,
TorqueDirection=false,
useSupport=false);
Modelica.Mechanics.Rotational.Sources.QuadraticSpeedDependentTorque
quadraticLoadTorqueE(
w_nominal=w_Load,
tau_nominal=-T_Load,
TorqueDirection=false,
useSupport=false);
equation
connect(star.pin_n, ground.p);
connect(sineVoltage.plug_n, star.plug_p);
connect(aimcM.flange, loadInertiaM.flange_a);
connect(loadInertiaM.flange_b, quadraticLoadTorqueM.flange);
connect(terminalBoxM.plug_sn, aimcM.plug_sn);
connect(terminalBoxM.plug_sp, aimcM.plug_sp);
connect(terminalBoxM.plugSupply, currentRMSsensorM.plug_n);
connect(aimcE.flange, loadInertiaE.flange_a);
connect(loadInertiaE.flange_b, quadraticLoadTorqueE.flange);
connect(terminalBoxE.plug_sn, aimcE.plug_sn);
connect(terminalBoxE.plug_sp, aimcE.plug_sp);
connect(currentRMSsensorE.plug_n,terminalBoxE.plugSupply);
connect(sineVoltage.plug_p, idealCloser.plug_p);
connect(idealCloser.plug_n, currentRMSsensorM.plug_p);
connect(booleanStep.y, idealCloser.control);
connect(currentRMSsensorE.plug_p, idealCloser.plug_n);
end AIMC_DOL;
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.AIMS_Start
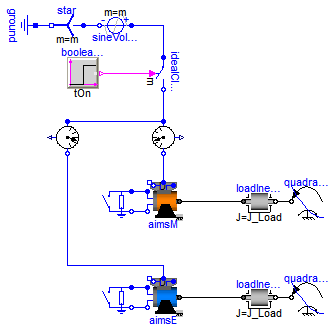
At start time tOn three phase voltage is supplied to the
asynchronous induction machine with sliprings.
The machine starts from standstill, accelerating inertias against load torque quadratic dependent on speed,
using a starting resistance. At time tRheostat external rotor resistance is shortened, finally reaching nominal speed.
Simulate for 1.5 seconds and plot (versus time):
currentRMSsensorM|E.I: equivalent RMS stator currentaimsM/E.wMechanical: machine speedaimsM|E.tauElectrical: machine torqueExtends from Modelica.Icons.Example (Icon for runnable examples).
| Type | Name | Default | Description |
|---|---|---|---|
| Voltage | VsNominal | 100 | Nominal RMS voltage per phase [V] |
| Frequency | fsNominal | 50 | Nominal frequency [Hz] |
| Time | tOn | 0.1 | Start time of machine [s] |
| Resistance | RStart | 0.16 | Starting resistance [Ohm] |
| Time | tRheostat | 1.0 | Time of shortening the rheostat [s] |
| Torque | T_Load | 161.4 | Nominal load torque [N.m] |
| AngularVelocity | w_Load | Modelica.SIunits.Conversions... | Nominal load speed [rad/s] |
| Inertia | J_Load | 0.29 | Load inertia [kg.m2] |
| Integer | p | 2 | Number of pole pairs |
| Resistance | Rs | 0.03 | Stator resistance per phase [Ohm] |
| Inductance | Lssigma | 3*(1 - sqrt(1 - 0.0667))/(2*... | Stator stray inductance per phase [H] |
| Inductance | Lm | 3*sqrt(1 - 0.0667)/(2*Modeli... | Main field inductance [H] |
| Inductance | Lrsigma | 3*(1 - sqrt(1 - 0.0667))/(2*... | Rotor stray inductance (equivalent three phase winding) [H] |
| Resistance | Rr | 0.04 | Rotor resistance (equivalent three phase winding) [Ohm] |
model AIMS_Start
"Starting of asynchronous induction machine with slip rings"
extends Modelica.Icons.Example;
constant Integer m=3 "Number of phases";
parameter Modelica.SIunits.Voltage VsNominal=100
"Nominal RMS voltage per phase";
parameter Modelica.SIunits.Frequency fsNominal=50 "Nominal frequency";
parameter Modelica.SIunits.Time tOn=0.1 "Start time of machine";
parameter Modelica.SIunits.Resistance RStart=0.16 "Starting resistance";
parameter Modelica.SIunits.Time tRheostat=1.0
"Time of shortening the rheostat";
parameter Modelica.SIunits.Torque T_Load=161.4 "Nominal load torque";
parameter Modelica.SIunits.AngularVelocity w_Load(displayUnit="1/min")=
Modelica.SIunits.Conversions.from_rpm(1440.45) "Nominal load speed";
parameter Modelica.SIunits.Inertia J_Load=0.29 "Load inertia";
parameter Integer p = 2 "Number of pole pairs";
parameter Modelica.SIunits.Resistance Rs = 0.03 "Stator resistance per phase";
parameter Modelica.SIunits.Inductance Lssigma = 3*(1 - sqrt(1 - 0.0667))/(2*Modelica.Constants.pi*fsNominal)
"Stator stray inductance per phase";
parameter Modelica.SIunits.Inductance Lm = 3*sqrt(1 - 0.0667)/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance";
parameter Modelica.SIunits.Inductance Lrsigma = 3*(1 - sqrt(1 - 0.0667))/(2*Modelica.Constants.pi*fsNominal)
"Rotor stray inductance (equivalent three phase winding)";
parameter Modelica.SIunits.Resistance Rr = 0.04
"Rotor resistance (equivalent three phase winding)";
Modelica.Electrical.Analog.Basic.Ground ground;
Modelica.Electrical.MultiPhase.Basic.Star star(final m=m);
Modelica.Electrical.MultiPhase.Sources.SineVoltage sineVoltage(
final m=m,
freqHz=fill(fsNominal, m),
V=fill(sqrt(2.0/3.0)*VsNominal, m));
Modelica.Electrical.MultiPhase.Ideal.IdealClosingSwitch idealCloser(
final m=m);
Modelica.Blocks.Sources.BooleanStep booleanStep[m](
each startTime=tOn);
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorM;
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorE;
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxM(
terminalConnection="D");
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxE(
terminalConnection="D");
Modelica.Magnetic.FundamentalWave.BasicMachines.AsynchronousInductionMachines.AIM_SlipRing
aimsM(
Rs=Rs,
Lssigma=Lssigma,
Lm=Lm,
Lrsigma=Lrsigma,
Rr=Rr,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"),
p=p);
Modelica.Electrical.Machines.BasicMachines.AsynchronousInductionMachines.AIM_SlipRing
aimsE(
p=p,
Rs=Rs,
Lssigma=Lssigma,
Lm=Lm,
Lrsigma=Lrsigma,
Rr=Rr,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Electrical.Machines.Utilities.SwitchedRheostat rheostatM(
RStart=RStart,
tStart=tRheostat);
Electrical.Machines.Utilities.SwitchedRheostat rheostatE(
RStart=RStart,
tStart=tRheostat);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaM(
J=J_Load);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaE(J=J_Load);
Modelica.Mechanics.Rotational.Sources.QuadraticSpeedDependentTorque
quadraticLoadTorqueM(
tau_nominal=-T_Load,
TorqueDirection=false,
useSupport=false,
w_nominal=w_Load);
Modelica.Mechanics.Rotational.Sources.QuadraticSpeedDependentTorque
quadraticLoadTorqueE(
tau_nominal=-T_Load,
TorqueDirection=false,
useSupport=false,
w_nominal=w_Load);
equation
connect(star.pin_n, ground.p);
connect(sineVoltage.plug_n, star.plug_p);
connect(loadInertiaE.flange_b, quadraticLoadTorqueE.flange);
connect(aimsE.flange, loadInertiaE.flange_a);
connect(booleanStep.y, idealCloser.control);
connect(terminalBoxE.plug_sn, aimsE.plug_sn);
connect(terminalBoxE.plug_sp, aimsE.plug_sp);
connect(rheostatE.plug_p, aimsE.plug_rp);
connect(rheostatE.plug_n, aimsE.plug_rn);
connect(loadInertiaM.flange_b, quadraticLoadTorqueM.flange);
connect(aimsM.flange, loadInertiaM.flange_a);
connect(terminalBoxM.plug_sp, aimsM.plug_sp);
connect(terminalBoxM.plug_sn, aimsM.plug_sn);
connect(currentRMSsensorM.plug_n, terminalBoxM.plugSupply);
connect(rheostatM.plug_p, aimsM.plug_rp);
connect(rheostatM.plug_n, aimsM.plug_rn);
connect(currentRMSsensorE.plug_n, terminalBoxE.plugSupply);
connect(idealCloser.plug_n, currentRMSsensorM.plug_p);
connect(currentRMSsensorE.plug_p, idealCloser.plug_n);
connect(idealCloser.plug_p, sineVoltage.plug_p);
end AIMS_Start;
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SMPM_Inverter
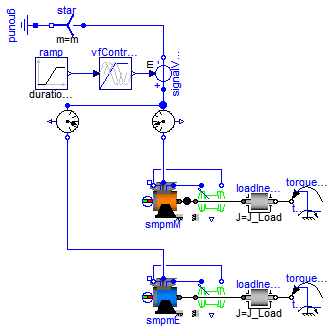
An ideal frequency inverter is modeled by using a VfController and a threephase SignalVoltage. Frequency is raised by a ramp, causing the permanent magnet synchronous induction machine to start, and accelerate the inertias.
At time tStep a load step is applied. Simulate for 1.5 seconds and plot (versus time):
currentRMSsensorM|E.I: equivalent RMS stator currentpmsmM|E.wMechanical: machine speedpmsmM|E.tauElectrical: machine torquerotorAnglepmsmM|E.rotorDisplacementAngle: rotor displacement angleExtends from Modelica.Icons.Example (Icon for runnable examples).
| Type | Name | Default | Description |
|---|---|---|---|
| Voltage | VsNominal | 100 | Nominal RMS voltage per phase [V] |
| Frequency | fsNominal | 50 | Nominal frequency [Hz] |
| Frequency | fKnee | 50 | Knee frequency of V/f curve [Hz] |
| Time | tRamp | 1 | Frequency ramp [s] |
| Torque | T_Load | 181.4 | Nominal load torque [N.m] |
| Time | tStep | 1.2 | Time of load torque step [s] |
| Inertia | J_Load | 0.29 | Load inertia [kg.m2] |
| Integer | p | 2 | Number of pole pairs |
| Resistance | Rs | 0.03 | Warm stator resistance per phase [Ohm] |
| Inductance | Lssigma | 0.1/(2*Modelica.Constants.pi... | Stator stray inductance per phase [H] |
| Inductance | Lmd | 0.3/(2*Modelica.Constants.pi... | Main field inductance in d-axis [H] |
| Inductance | Lmq | 0.3/(2*Modelica.Constants.pi... | Main field inductance in q-axis [H] |
| Inductance | Lrsigmad | 0.05/(2*Modelica.Constants.p... | Damper stray inductance (equivalent three phase winding) d-axis [H] |
| Inductance | Lrsigmaq | Lrsigmad | Damper stray inductance (equivalent three phase winding) dq-axis [H] |
| Resistance | Rrd | 0.04 | Warm damper resistance (equivalent three phase winding) d-axis [Ohm] |
| Resistance | Rrq | Rrd | Warm damper resistance (equivalent three phase winding) q-axis [Ohm] |
model SMPM_Inverter
"Starting of permanent magnet synchronous machine with inverter"
extends Modelica.Icons.Example;
constant Integer m=3 "Number of phases";
parameter Modelica.SIunits.Voltage VsNominal=100
"Nominal RMS voltage per phase";
parameter Modelica.SIunits.Frequency fsNominal=50 "Nominal frequency";
parameter Modelica.SIunits.Frequency fKnee=50 "Knee frequency of V/f curve";
parameter Modelica.SIunits.Time tRamp=1 "Frequency ramp";
parameter Modelica.SIunits.Torque T_Load=181.4 "Nominal load torque";
parameter Modelica.SIunits.Time tStep=1.2 "Time of load torque step";
parameter Modelica.SIunits.Inertia J_Load=0.29 "Load inertia";
parameter Integer p = 2 "Number of pole pairs";
parameter Modelica.SIunits.Resistance Rs=0.03
"Warm stator resistance per phase";
parameter Modelica.SIunits.Inductance Lssigma=0.1/(2*Modelica.Constants.pi*fsNominal)
"Stator stray inductance per phase";
parameter Modelica.SIunits.Inductance Lmd=0.3/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance in d-axis";
parameter Modelica.SIunits.Inductance Lmq=0.3/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance in q-axis";
parameter Modelica.SIunits.Inductance Lrsigmad=0.05/(2*Modelica.Constants.pi*fsNominal)
"Damper stray inductance (equivalent three phase winding) d-axis";
parameter Modelica.SIunits.Inductance Lrsigmaq=Lrsigmad
"Damper stray inductance (equivalent three phase winding) dq-axis";
parameter Modelica.SIunits.Resistance Rrd=0.04
"Warm damper resistance (equivalent three phase winding) d-axis";
parameter Modelica.SIunits.Resistance Rrq=Rrd
"Warm damper resistance (equivalent three phase winding) q-axis";
Modelica.Electrical.Analog.Basic.Ground ground;
Modelica.Electrical.MultiPhase.Basic.Star star(
final m=m);
Modelica.Electrical.MultiPhase.Sources.SignalVoltage signalVoltage(
final m=m);
Modelica.Blocks.Sources.Ramp ramp(
height=fKnee,
duration=tRamp);
Modelica.Electrical.Machines.Utilities.VfController vfController(
final m=m,
VNominal=VsNominal,
fNominal=fsNominal,
BasePhase=+Modelica.Constants.pi/2);
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorM;
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorE;
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxM(
terminalConnection="Y");
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxE(
terminalConnection="Y");
Modelica.Magnetic.FundamentalWave.BasicMachines.SynchronousInductionMachines.SM_PermanentMagnet
smpmM(
Rs=Rs,
Lssigma=Lssigma,
Lmd=Lmd,
Lmq=Lmq,
Lrsigmad=Lrsigmad,
Lrsigmaq=Lrsigmaq,
Rrd=Rrd,
Rrq=Rrq,
p=p,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Modelica.Electrical.Machines.BasicMachines.SynchronousInductionMachines.SM_PermanentMagnet
smpmE(
Rs=Rs,
Lssigma=Lssigma,
Lmd=Lmd,
Lmq=Lmq,
Lrsigmad=Lrsigmad,
Lrsigmaq=Lrsigmaq,
Rrd=Rrd,
Rrq=Rrq,
p=p,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Modelica.Electrical.Machines.Sensors.RotorDisplacementAngle rotorAngleM(
p=p);
Modelica.Electrical.Machines.Sensors.RotorDisplacementAngle rotorAngleE(
p=p);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaM(
J=J_Load);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaE(
J=J_Load);
Modelica.Mechanics.Rotational.Sources.TorqueStep torqueStepM(
startTime=tStep,
stepTorque=-T_Load,
useSupport=false);
Modelica.Mechanics.Rotational.Sources.TorqueStep torqueStepE(
startTime=tStep,
stepTorque=-T_Load,
useSupport=false);
equation
connect(signalVoltage.plug_n, star.plug_p);
connect(star.pin_n, ground.p);
connect(ramp.y, vfController.u);
connect(vfController.y, signalVoltage.v);
connect(loadInertiaM.flange_b, torqueStepM.flange);
connect(signalVoltage.plug_p,currentRMSsensorM. plug_p);
connect(rotorAngleM.plug_n, smpmM.plug_sn);
connect(rotorAngleM.plug_p, smpmM.plug_sp);
connect(rotorAngleM.flange,smpmM.flange);
connect(smpmM.flange, loadInertiaM.flange_a);
connect(terminalBoxM.plug_sn, smpmM.plug_sn);
connect(terminalBoxM.plug_sp, smpmM.plug_sp);
connect(terminalBoxM.plugSupply,currentRMSsensorM. plug_n);
connect(loadInertiaE.flange_b, torqueStepE.flange);
connect(rotorAngleE.plug_n, smpmE.plug_sn);
connect(rotorAngleE.plug_p, smpmE.plug_sp);
connect(rotorAngleE.flange,smpmE.flange);
connect(smpmE.flange, loadInertiaE.flange_a);
connect(terminalBoxE.plug_sn, smpmE.plug_sn);
connect(terminalBoxE.plug_sp, smpmE.plug_sp);
connect(currentRMSsensorE.plug_n,terminalBoxE.plugSupply);
connect(currentRMSsensorE.plug_p, signalVoltage.plug_p);
end SMPM_Inverter;
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SMEE_Generator
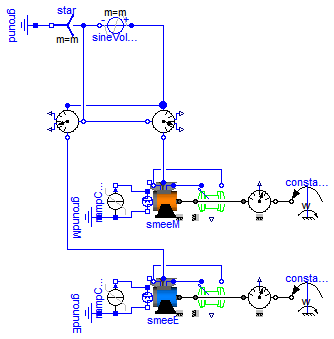
An electrically excited synchronous generator is connected to the grid and driven with constant speed. Since speed is slightly smaller than synchronous speed corresponding to mains frequency, rotor angle is very slowly increased. This allows to see several charactersistics dependent on rotor angle.
Simulate for 30 seconds and plot (versus rotorAngleM.rotorDisplacementAngle):
speedM|E.tauElectrical: machine torquemechanicalPowerSensorM|E.P: mechanical powerExtends from Modelica.Icons.Example (Icon for runnable examples).
| Type | Name | Default | Description |
|---|---|---|---|
| Voltage | VsNominal | 100 | Nominal RMS voltage per phase [V] |
| Frequency | fsNominal | 50 | Nominal frequency [Hz] |
| AngularVelocity | w | Modelica.SIunits.Conversions... | Nominal speed [rad/s] |
| Current | Ie | 19 | Excitation current [A] |
| Current | Ie0 | 10 | Initial excitation current [A] |
| Angle | gamma0 | 0 | Initial rotor displacement angle [rad] |
| Integer | p | 2 | Number of pole pairs |
| Resistance | Rs | 0.03 | Warm stator resistance per phase [Ohm] |
| Inductance | Lssigma | 0.1/(2*Modelica.Constants.pi... | Stator stray inductance per phase [H] |
| Inductance | Lmd | 1.5/(2*Modelica.Constants.pi... | Main field inductance in d-axis [H] |
| Inductance | Lmq | 1.5/(2*Modelica.Constants.pi... | Main field inductance in q-axis [H] |
| Inductance | Lrsigmad | 0.05/(2*Modelica.Constants.p... | Damper stray inductance (equivalent three phase winding) d-axis [H] |
| Inductance | Lrsigmaq | Lrsigmad | Damper stray inductance (equivalent three phase winding) q-axis [H] |
| Resistance | Rrd | 0.04 | Warm damper resistance (equivalent three phase winding) d-axis [Ohm] |
| Resistance | Rrq | Rrd | Warm damper resistance (equivalent three phase winding) q-axis [Ohm] |
model SMEE_Generator
"Electrical excited synchronous machine operating as generator"
extends Modelica.Icons.Example;
import Modelica.Constants.pi;
constant Integer m=3 "Number of phases";
parameter Modelica.SIunits.Voltage VsNominal=100
"Nominal RMS voltage per phase";
parameter Modelica.SIunits.Frequency fsNominal=50 "Nominal frequency";
parameter Modelica.SIunits.AngularVelocity w=
Modelica.SIunits.Conversions.from_rpm(1499) "Nominal speed";
parameter Modelica.SIunits.Current Ie = 19 "Excitation current";
parameter Modelica.SIunits.Current Ie0 = 10 "Initial excitation current";
parameter Modelica.SIunits.Angle gamma0(displayUnit="deg") = 0
"Initial rotor displacement angle";
parameter Integer p = 2 "Number of pole pairs";
parameter Modelica.SIunits.Resistance Rs=0.03
"Warm stator resistance per phase";
parameter Modelica.SIunits.Inductance Lssigma=0.1/(2*Modelica.Constants.pi*fsNominal)
"Stator stray inductance per phase";
parameter Modelica.SIunits.Inductance Lmd=1.5/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance in d-axis";
parameter Modelica.SIunits.Inductance Lmq=1.5/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance in q-axis";
parameter Modelica.SIunits.Inductance Lrsigmad=0.05/(2*Modelica.Constants.pi*fsNominal)
"Damper stray inductance (equivalent three phase winding) d-axis";
parameter Modelica.SIunits.Inductance Lrsigmaq=Lrsigmad
"Damper stray inductance (equivalent three phase winding) q-axis";
parameter Modelica.SIunits.Resistance Rrd=0.04
"Warm damper resistance (equivalent three phase winding) d-axis";
parameter Modelica.SIunits.Resistance Rrq=Rrd
"Warm damper resistance (equivalent three phase winding) q-axis";
Modelica.Electrical.MultiPhase.Basic.Star star(
final m=m);
Modelica.Electrical.Analog.Basic.Ground ground;
Modelica.Electrical.MultiPhase.Sources.SineVoltage sineVoltage(
final m=m,
final V=fill(VsNominal*sqrt(2), m),
final freqHz=fill(fsNominal, m));
Electrical.Machines.Sensors.ElectricalPowerSensor
electricalPowerSensorM;
Electrical.Machines.Sensors.ElectricalPowerSensor
electricalPowerSensorE;
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxM(
terminalConnection="Y");
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxE(
terminalConnection="Y");
Modelica.Magnetic.FundamentalWave.BasicMachines.SynchronousInductionMachines.SM_ElectricalExcited
smeeM(
Rs=Rs,
Lssigma=Lssigma,
Lmd=Lmd,
Lmq=Lmq,
Lrsigmad=Lrsigmad,
Lrsigmaq=Lrsigmaq,
Rrd=Rrd,
Rrq=Rrq,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"),
alpha20e(displayUnit="1/K"),
phiMechanical(start=-(Modelica.Constants.pi + gamma0)/p, fixed=true));
Modelica.Electrical.Machines.BasicMachines.SynchronousInductionMachines.SM_ElectricalExcited
smeeE(
Rs=Rs,
Lssigma=Lssigma,
Lmd=Lmd,
Lmq=Lmq,
Lrsigmad=
Lrsigmad,
Lrsigmaq=Lrsigmaq,
Rrd=Rrd,
Rrq=Rrq,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"),
alpha20e(displayUnit="1/K"),
phiMechanical(start=-(Modelica.Constants.pi + gamma0)/p, fixed=true));
Modelica.Electrical.Analog.Basic.Ground groundM;
Modelica.Electrical.Analog.Basic.Ground groundE;
Modelica.Electrical.Analog.Sources.RampCurrent rampCurrentM(
duration=0.1,
I=Ie - Ie0,
offset=Ie0);
Modelica.Electrical.Analog.Sources.RampCurrent rampCurrentE(
duration=0.1,
I=Ie - Ie0,
offset=Ie0);
Modelica.Electrical.Machines.Sensors.RotorDisplacementAngle rotorAngleM(p=p);
Modelica.Electrical.Machines.Sensors.RotorDisplacementAngle rotorAngleE(
p=p);
Modelica.Electrical.Machines.Sensors.MechanicalPowerSensor
mechanicalPowerSensorM;
Modelica.Electrical.Machines.Sensors.MechanicalPowerSensor
mechanicalPowerSensorE;
Modelica.Mechanics.Rotational.Sources.ConstantSpeed constantSpeedM(
final w_fixed=w, useSupport=false);
Modelica.Mechanics.Rotational.Sources.ConstantSpeed constantSpeedE(
final w_fixed=w, useSupport=false);
equation
connect(rotorAngleE.plug_n,smeeE. plug_sn);
connect(rotorAngleE.plug_p,smeeE. plug_sp);
connect(rotorAngleE.flange,smeeE.flange);
connect(star.pin_n, ground.p);
connect(star.plug_p, sineVoltage.plug_n);
connect(smeeE.flange, mechanicalPowerSensorE. flange_a);
connect(mechanicalPowerSensorE.flange_b,constantSpeedE. flange);
connect(rampCurrentE.p,groundE. p);
connect(rampCurrentE.p,smeeE. pin_en);
connect(rampCurrentE.n,smeeE. pin_ep);
connect(smeeE.plug_sn,terminalBoxE.plug_sn);
connect(smeeE.plug_sp,terminalBoxE.plug_sp);
connect(rotorAngleM.plug_n, smeeM.plug_sn);
connect(rotorAngleM.plug_p, smeeM.plug_sp);
connect(rotorAngleM.flange,smeeM.flange);
connect(smeeM.flange, mechanicalPowerSensorM.flange_a);
connect(mechanicalPowerSensorM.flange_b, constantSpeedM.flange);
connect(rampCurrentM.p, groundM.p);
connect(rampCurrentM.p, smeeM.pin_en);
connect(rampCurrentM.n, smeeM.pin_ep);
connect(smeeM.plug_sn,terminalBoxM.plug_sn);
connect(smeeM.plug_sp,terminalBoxM.plug_sp);
connect(electricalPowerSensorM.plug_p, sineVoltage.plug_p);
connect(electricalPowerSensorE.plug_p, sineVoltage.plug_p);
connect(electricalPowerSensorM.plug_ni, terminalBoxM.plugSupply);
connect(electricalPowerSensorE.plug_ni, terminalBoxE.plugSupply);
connect(electricalPowerSensorE.plug_nv, star.plug_p);
connect(electricalPowerSensorM.plug_nv, star.plug_p);
end SMEE_Generator;
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SMR_Inverter
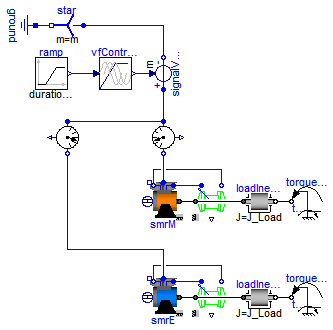
An ideal frequency inverter is modeled by using a
VfController
and a threephase SignalVoltage.
Frequency is raised by a ramp, causing the
reluctance machine to start,
and accelerating inertias. At time tStep a load step is applied.
Simulate for 1.5 seconds and plot (versus time):
currentRMSsensorM|E.I: equivalent RMS stator currentsmrM|E.wMechanical: machine speedsmrM|E.tauElectrical: machine torquerotorAngleM|R.rotorDisplacementAngle: rotor displacement angleExtends from Modelica.Icons.Example (Icon for runnable examples).
| Type | Name | Default | Description |
|---|---|---|---|
| Voltage | VsNominal | 100 | Nominal RMS voltage per phase [V] |
| Frequency | fsNominal | 50 | Nominal frequency [Hz] |
| Frequency | fKnee | 50 | Knee frequency of V/f curve [Hz] |
| Time | tRamp | 1 | Frequency ramp [s] |
| Torque | T_Load | 46 | Nominal load torque [N.m] |
| Time | tStep | 1.2 | Nime of load torque step [s] |
| Inertia | J_Load | 0.29 | Load inertia [kg.m2] |
| Integer | p | 2 | Number of pole pairs |
| Resistance | Rs | 0.03 | Warm stator resistance per phase [Ohm] |
| Inductance | Lssigma | 0.1/(2*Modelica.Constants.pi... | Stator stray inductance per phase [H] |
| Inductance | Lmd | 2.9/(2*Modelica.Constants.pi... | Main field inductance in d-axis [H] |
| Inductance | Lmq | 0.9/(2*Modelica.Constants.pi... | Main field inductance in q-axis [H] |
| Inductance | Lrsigmad | 0.05/(2*Modelica.Constants.p... | Damper stray inductance (equivalent three phase winding) d-axis [H] |
| Inductance | Lrsigmaq | Lrsigmad | Damper stray inductance (equivalent three phase winding) q-axis) [H] |
| Resistance | Rrd | 0.04 | Warm damper resistance (equivalent three phase winding) d-axis [Ohm] |
| Resistance | Rrq | Rrd | Warm damper resistance (equivalent three phase winding) q-axis) [Ohm] |
model SMR_Inverter
"Starting of synchronous reluctance machine with inverter"
extends Modelica.Icons.Example;
constant Integer m=3 "Number of phases";
parameter Modelica.SIunits.Voltage VsNominal=100
"Nominal RMS voltage per phase";
parameter Modelica.SIunits.Frequency fsNominal=50 "Nominal frequency";
parameter Modelica.SIunits.Frequency fKnee=50 "Knee frequency of V/f curve";
parameter Modelica.SIunits.Time tRamp=1 "Frequency ramp";
parameter Modelica.SIunits.Torque T_Load=46 "Nominal load torque";
parameter Modelica.SIunits.Time tStep=1.2 "Nime of load torque step";
parameter Modelica.SIunits.Inertia J_Load=0.29 "Load inertia";
parameter Integer p = 2 "Number of pole pairs";
parameter Modelica.SIunits.Resistance Rs=0.03
"Warm stator resistance per phase";
parameter Modelica.SIunits.Inductance Lssigma=0.1/(2*Modelica.Constants.pi*fsNominal)
"Stator stray inductance per phase";
parameter Modelica.SIunits.Inductance Lmd=2.9/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance in d-axis";
parameter Modelica.SIunits.Inductance Lmq=0.9/(2*Modelica.Constants.pi*fsNominal)
"Main field inductance in q-axis";
parameter Modelica.SIunits.Inductance Lrsigmad=0.05/(2*Modelica.Constants.pi*fsNominal)
"Damper stray inductance (equivalent three phase winding) d-axis";
parameter Modelica.SIunits.Inductance Lrsigmaq=Lrsigmad
"Damper stray inductance (equivalent three phase winding) q-axis)";
parameter Modelica.SIunits.Resistance Rrd=0.04
"Warm damper resistance (equivalent three phase winding) d-axis";
parameter Modelica.SIunits.Resistance Rrq=Rrd
"Warm damper resistance (equivalent three phase winding) q-axis)";
Modelica.Electrical.Analog.Basic.Ground ground;
Modelica.Electrical.MultiPhase.Basic.Star star(
final m=m);
Modelica.Electrical.MultiPhase.Sources.SignalVoltage signalVoltage(
final m=m);
Modelica.Blocks.Sources.Ramp ramp(height=fKnee, duration=tRamp);
Modelica.Electrical.Machines.Utilities.VfController vfController(
final m=m,
VNominal=VsNominal,
fNominal=fsNominal);
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorM;
Modelica.Electrical.Machines.Sensors.CurrentQuasiRMSSensor
currentRMSsensorE;
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxM(
terminalConnection="Y");
Modelica.Electrical.Machines.Utilities.TerminalBox terminalBoxE(
terminalConnection="Y");
Modelica.Magnetic.FundamentalWave.BasicMachines.SynchronousInductionMachines.SM_ReluctanceRotor
smrM(
p=p,
Rs=Rs,
Lssigma=Lssigma,
Lmd=Lmd,
Lmq=Lmq,
Lrsigmad=Lrsigmad,
Lrsigmaq=Lrsigmaq,
Rrd=Rrd,
Rrq=Rrq,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Modelica.Electrical.Machines.BasicMachines.SynchronousInductionMachines.SM_ReluctanceRotor
smrE(
p=p,
Rs=Rs,
Lssigma=Lssigma,
Lmd=Lmd,
Lmq=Lmq,
Lrsigmad=Lrsigmad,
Lrsigmaq=Lrsigmaq,
Rrd=Rrd,
Rrq=Rrq,
alpha20s(displayUnit="1/K"),
alpha20r(displayUnit="1/K"));
Modelica.Electrical.Machines.Sensors.RotorDisplacementAngle rotorAngleM(
p=p);
Modelica.Electrical.Machines.Sensors.RotorDisplacementAngle rotorAngleE(
p=p);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaM(
J=J_Load);
Modelica.Mechanics.Rotational.Components.Inertia loadInertiaE(
J=J_Load);
Modelica.Mechanics.Rotational.Sources.TorqueStep torqueStepM(
startTime=tStep,
stepTorque=-T_Load,
useSupport=false);
Modelica.Mechanics.Rotational.Sources.TorqueStep torqueStepE(
startTime=tStep,
stepTorque=-T_Load,
useSupport=false);
equation
connect(signalVoltage.plug_n, star.plug_p);
connect(star.pin_n, ground.p);
connect(smrE.flange, loadInertiaE.flange_a);
connect(ramp.y, vfController.u);
connect(vfController.y, signalVoltage.v);
connect(loadInertiaE.flange_b, torqueStepE.flange);
connect(smrE.plug_sn,rotorAngleE. plug_n);
connect(smrE.plug_sp,rotorAngleE. plug_p);
connect(smrE.flange, rotorAngleE. flange);
connect(terminalBoxE.plug_sp, smrE. plug_sp);
connect(terminalBoxE.plug_sn, smrE. plug_sn);
connect(terminalBoxE.plugSupply,currentRMSsensorE. plug_n);
connect(smrM.flange, loadInertiaM.flange_a);
connect(loadInertiaM.flange_b, torqueStepM.flange);
connect(smrM.plug_sn, rotorAngleM.plug_n);
connect(smrM.plug_sp, rotorAngleM.plug_p);
connect(smrM.flange, rotorAngleM.flange);
connect(terminalBoxM.plug_sp, smrM.plug_sp);
connect(terminalBoxM.plug_sn, smrM.plug_sn);
connect(currentRMSsensorM.plug_n,terminalBoxM.plugSupply);
connect(signalVoltage.plug_p, currentRMSsensorM.plug_p);
connect(signalVoltage.plug_p, currentRMSsensorE.plug_p);
end SMR_Inverter;