Extends from Modelica.Icons.Package (Icon for standard packages).
| Name | Description |
|---|---|
| Parameter record for friction losses | |
| Parameter record for brush losses | |
| Parameter record for stray load losses | |
| Parameter record for core losses | |
| Model of angular velocity dependent friction losses | |
| Loss models for induction machines | |
| Loss models for DC machines |
 Modelica.Electrical.Machines.Losses.FrictionParameters
Modelica.Electrical.Machines.Losses.FrictionParameters
Parameter record for Friction losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Default | Description |
|---|---|---|---|
| Power | PRef | Reference friction losses at wRef [W] | |
| AngularVelocity | wRef | Reference angular velocity that the PRef refer to [rad/s] | |
| Real | power_w | 2 | Exponent of friction torque w.r.t. angular velocity |
record FrictionParameters "Parameter record for friction losses"
extends Modelica.Icons.Record;
parameter Modelica.SIunits.Power PRef(min=0, start=0)
"Reference friction losses at wRef";
parameter Modelica.SIunits.AngularVelocity wRef(displayUnit="1/min", min=Modelica.Constants.small)
"Reference angular velocity that the PRef refer to";
parameter Real power_w(min=Modelica.Constants.small) = 2
"Exponent of friction torque w.r.t. angular velocity";
final parameter Modelica.SIunits.Torque tauRef = if (PRef<=0) then 0 else PRef / wRef
"Reference friction torque at reference angular velocity";
final parameter Real linear = 0.001
"Linear angular velocity range with respect to reference angular velocity";
final parameter Modelica.SIunits.AngularVelocity wLinear = linear*wRef
"Linear angular velocity range";
final parameter Modelica.SIunits.Torque tauLinear = if (PRef<=0) then 0 else tauRef*(wLinear/wRef)^power_w
"Torque corresponding with linear angular velocity range";
end FrictionParameters;
Modelica.Electrical.Machines.Losses.BrushParameters
Parameter record for threephase Brush and DC Brush losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Default | Description |
|---|---|---|---|
| Voltage | V | Total voltage drop of brushes for currents > ILinear [V] | |
| Current | ILinear | Current indicating linear voltage region of brush voltage drop [A] |
record BrushParameters "Parameter record for brush losses"
extends Modelica.Icons.Record;
parameter Modelica.SIunits.Voltage V(start=0)
"Total voltage drop of brushes for currents > ILinear";
parameter Modelica.SIunits.Current ILinear(start=0.01)
"Current indicating linear voltage region of brush voltage drop";
end BrushParameters;
Modelica.Electrical.Machines.Losses.StrayLoadParameters
Parameter record for threephase and DC stray load losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Default | Description |
|---|---|---|---|
| Power | PRef | Reference stray load losses at IRef and wRef [W] | |
| Current | IRef | Reference RMS current that PRef refers to [A] | |
| AngularVelocity | wRef | Reference angular velocity that PRef refers to [rad/s] | |
| Real | power_w | 1 | Exponent of stray load loss torque w.r.t. angular velocity |
record StrayLoadParameters "Parameter record for stray load losses"
extends Modelica.Icons.Record;
parameter Modelica.SIunits.Power PRef(min=0, start=0)
"Reference stray load losses at IRef and wRef";
parameter Modelica.SIunits.Current IRef(min=Modelica.Constants.small)
"Reference RMS current that PRef refers to";
parameter Modelica.SIunits.AngularVelocity wRef(displayUnit="1/min", min=Modelica.Constants.small)
"Reference angular velocity that PRef refers to";
parameter Real power_w(min=Modelica.Constants.small) = 1
"Exponent of stray load loss torque w.r.t. angular velocity";
final parameter Modelica.SIunits.Torque tauRef = if (PRef<=0) then 0 else PRef / wRef
"Reference friction torque at reference angular velocity and reference current";
end StrayLoadParameters;
Modelica.Electrical.Machines.Losses.CoreParameters
Parameter record for core losses of induction machines and core losses of DC machines.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Default | Description |
|---|---|---|---|
| Integer | m | Number of phases (1 for DC, 3 for induction machines) | |
| Power | PRef | Reference core losses at reference inner voltage VRef [W] | |
| Voltage | VRef | Reference inner RMS voltage that reference core losses PRef refer to [V] | |
| AngularVelocity | wRef | Reference angular velocity that reference core losses PRef refer to [rad/s] |
record CoreParameters "Parameter record for core losses"
extends Modelica.Icons.Record;
parameter Integer m "Number of phases (1 for DC, 3 for induction machines)";
parameter Modelica.SIunits.Power PRef(min=0, start=0)
"Reference core losses at reference inner voltage VRef";
parameter Modelica.SIunits.Voltage VRef(min=Modelica.Constants.small)
"Reference inner RMS voltage that reference core losses PRef refer to";
parameter Modelica.SIunits.AngularVelocity wRef(min=Modelica.Constants.small)
"Reference angular velocity that reference core losses PRef refer to";
// In the current implementation ratioHysterisis = 0 since hysteresis losses are not implemented yet
final parameter Real ratioHysteresis(min=0, max=1, start=0.775) = 0
"Ratio of hysteresis losses with respect to the total core losses at VRef and fRef";
final parameter Modelica.SIunits.Conductance GcRef = if (PRef<=0) then 0 else PRef / VRef^2 / m
"Reference conductance at reference frequency and voltage";
final parameter Modelica.SIunits.AngularVelocity wMin=1e-6*wRef;
end CoreParameters;
 Modelica.Electrical.Machines.Losses.Friction
Modelica.Electrical.Machines.Losses.Friction

The friction losses are considered by the equations
tau / tauRef = (+w / wRef) ^ power_w for w > +wLinear - tau / tauRef = (-w / wRef) ^ power_w for w < -wLinear
with
tauRef * wRef = PRef
being the friction torque at the referenc angular velocity
wRef. The exponent power_w is
approximately 1.5 for axial ventilation and approximately 2.0 for radial ventilation.
For stability reasons the friction torque tau is approximated by a linear curve
tau / tauLinear = w / wLinear
with
tauLinear = tauRef*(wLinear/wRef) ^ power_w
in the range -wLinear ≤ w ≤ wLinear with wLinear = 0.001 * wRef. The relationship of torque
and angular velocity is depicted in Fig. 1
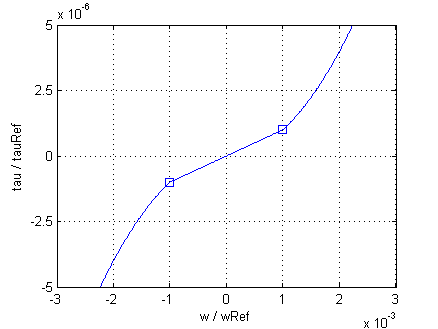 |
Fig. 1: Friction loss torque versus angular velocity for power_w = 2 |
If it is desired to neglect friction losses, set frictionParameters.PRef = 0 (this is the default).
Extends from Machines.Interfaces.FlangeSupport (Shaft and support).
| Type | Name | Default | Description |
|---|---|---|---|
| FrictionParameters | frictionParameters | Friction loss parameters |
| Type | Name | Description |
|---|---|---|
| Flange_a | flange | Shaft end |
| Flange_a | support | Housing and support |
| HeatPort_a | heatPort | Heat port to model heat flow |
model Friction "Model of angular velocity dependent friction losses" extends Machines.Interfaces.FlangeSupport; parameter FrictionParameters frictionParameters "Friction loss parameters";Modelica.Thermal.HeatTransfer.Interfaces.HeatPort_a heatPort "Heat port to model heat flow"; equation if (frictionParameters.PRef<=0) then tau = 0; else tau = -smooth(1,if w >= +frictionParameters.wLinear then +frictionParameters.tauRef*(+w/frictionParameters.wRef)^frictionParameters.power_w else if w <= -frictionParameters.wLinear then -frictionParameters.tauRef*(-w/frictionParameters.wRef)^frictionParameters.power_w else frictionParameters.tauLinear*(w/frictionParameters.wLinear)); end if; heatPort.Q_flow = tau*w;end Friction;