Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Validation
Collection of validation models
Information
This package contains models that validate the blocks in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.
Package Content
| Name | Description |
|---|---|
| Test model for identifying the gain of the control process | |
| Test model for identifying the the time constant and the time delay of the control process |
 Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Validation.Gain
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Validation.Gain
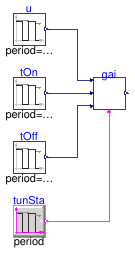
Test model for identifying the gain of the control process
Information
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Gain.
This testing scenario in this example is the same to that in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.Validation.ControlProcessModel.
Modelica definition
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Validation.TimeConstantDelay
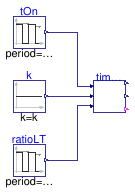
Test model for identifying the the time constant and the time delay of the control process
Information
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.TimeConstantDelay.
The input tOn changes from 0 to 0.1 at 0.1s,
input k is constant,
input ratioLT changes twice, from 0.3 to 0.4 at 0.32s and from 0.4 to 0.3 at 0.8s.