Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses
Package with base classes
Information
This package contains base classes to construct blocks in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.
Package Content
| Name | Description |
|---|---|
| Identify the gain of a first-order plus time-delay model | |
| Calculate the time constant and the time delay of a first-order plus time-delay model | |
| Collection of validation models |
 Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Gain
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.Gain
Identify the gain of a first-order plus time-delay model
Information
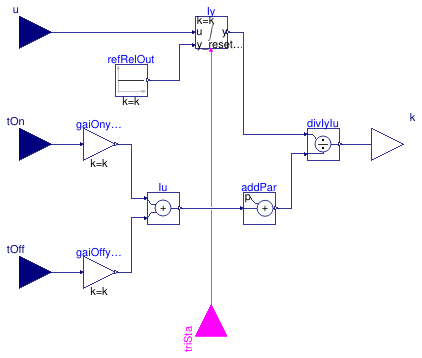
This block calculates the gain of a first-order plus time-delay model.
k = Iy/Iu,
Iy is calculated by
Iy = ∫ u(t) dt;
where u(t) is the relay output at t (see details in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.Relay.Controller).
Iu is calculated by
Iu = ton yhig - toffylow,
where yhig and ylow are constants related to an asymmetric relay output. ton and toff are the length of the on period and the off period of the same asymmetric relay output, respectively.
References
J. Berner (2017). "Automatic Controller Tuning using Relay-based Model Identification." Department of Automatic Control, Lund University.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Real | yHig | Higher value for the output (assuming the reference output is 0) | |
| Real | yLow | Lower value for the output (assuming the reference output is 0) |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Relay controller output, (measurement - setpoint) |
| input RealInput | tOn | Length for the on period [s] |
| input RealInput | tOff | Length for the off period [s] |
| input BooleanInput | triSta | Relay tuning status, true if the tuning starts |
| output RealOutput | k | Gain |
Modelica definition
 Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.TimeConstantDelay
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.FirstOrderTimeDelay.BaseClasses.TimeConstantDelay
Calculate the time constant and the time delay of a first-order plus time-delay model
Information
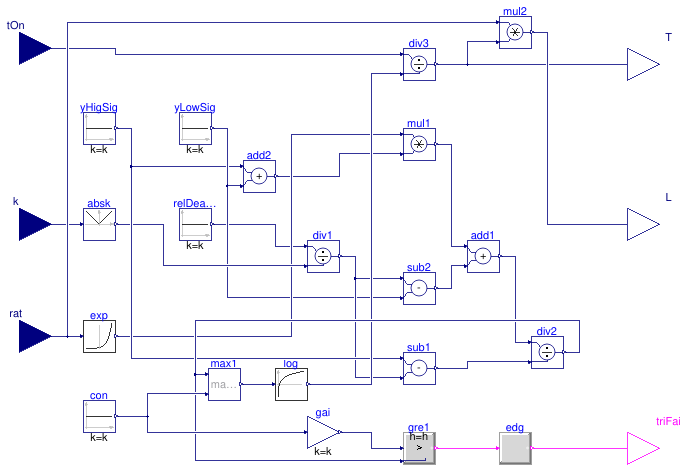
This block calculates the time constant and the time delay of a first-order plus time-delay (FOPTD) model.
Main equations
The time constant, T, is calculated by
T = ton/(ln((δ/|k|-yhig+exp(τ/(1 - τ))(yhig + ylow))/(yhig-δ/|k|))),
where yhig and ylow are constants related to
an asymmetric relay output.
ton is the length of the on period of the same asymmetric relay output.
δ is the dead band of the same asymmetric relay output.
k is the gain of this FOPTD model.
τ is the normalized time delay.
The time delay, L, is calculated by
L = T τ/(1 - τ),
References
J. Berner (2017). "Automatic Controller Tuning using Relay-based Model Identification." Department of Automatic Control, Lund University.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Real | yHig | Higher value for the output (assuming the reference output is 0) | |
| Real | yLow | Lower value for the output (assuming the reference output is 0) | |
| Real | deaBan | Deadband for holding the output value |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | tOn | Length for the on period [s] |
| input RealInput | k | Gain |
| input RealInput | rat | Ratio between the time constant and the time delay |
| output RealOutput | T | Time constant [s] |
| output RealOutput | L | Time delay [s] |
| output BooleanOutput | triFai | True when an error occurs in the autotuning process |