Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.Validation
Collection of models that validate the blocks in the AutoTuner
Information
This package contains models that validate the blocks in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.
Package Content
| Name | Description |
|---|---|
| Test model for calculating parameters of a PI controller | |
| Test model for calculating parameters of a PID controller |
 Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.Validation.PI
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.Validation.PI
Test model for calculating parameters of a PI controller
Information
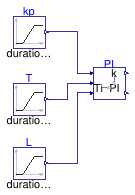
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.PI.
The input kp varies from 1 to 2, input T varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.
The control gain and the time constant of the integral term are calculated based on the equations shown in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.AutoTuner.BaseClasses.AMIGO.PIGain and Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.AutoTuner.AMIGO.BaseClasses.PIIntegralTime.
Modelica definition
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.Validation.PID
Test model for calculating parameters of a PID controller
Information
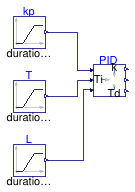
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.PID.
The input kp varies from 1 to 2, input T varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.
The control gain, the time constant of the integral term, and the time constant of the derivative term are calculated based on the equations shown in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.AutoTuner.BaseClasses.AMIGO.PIDGain, Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.AutoTuner.AMIGO.BaseClasses.PIDIntegralTime, and Buildings.Controls.OBC.Utilities.PIDWithAutotuning.SystemIdentification.AutoTuner.AMIGO.BaseClasses.PIDDerivativeTime.