Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation
Collection of validation models
Information
This package contains models that validate the blocks in Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.
Package Content
| Name | Description |
|---|---|
| Test model for calculating the derivative time for a PID controller | |
| Test model for calculating the control gain for a PID controller | |
| Test model for calculating the integral time for a PID controller | |
| Test model for calculating the gain for a PI controller | |
| Test model for calculating the integral time for a PI controller |
 Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation.PIDDerivativeTime
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation.PIDDerivativeTime
Test model for calculating the derivative time for a PID controller
Information
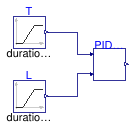
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.PIDDerivativeTime.
The input T varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.
Modelica definition
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation.PIDGain
Test model for calculating the control gain for a PID controller
Information
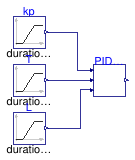
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.PIDGain.
The input kp varies from 1 to 2, input T
varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.
Modelica definition
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation.PIDIntegralTime
Test model for calculating the integral time for a PID controller
Information
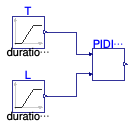
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.PIDIntegralTime.
The input T varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.
Modelica definition
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation.PIGain
Test model for calculating the gain for a PI controller
Information
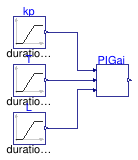
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.PIGain.
The input kp varies from 1 to 2, input T
varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.
Modelica definition
Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.Validation.PIIntegralTime
Test model for calculating the integral time for a PI controller
Information
Validation test for the block Buildings.Controls.OBC.Utilities.PIDWithAutotuning.AutoTuner.AMIGO.BaseClasses.PIIntegralTime.
The input T varies from 0.5 to 1,
and input L varies from 0.3 to 0.6.