Buildings.Obsolete.Controls.Continuous
Package with obsolete models for continuous time control
Information
This package contains obsolete models for continuous time control.
Extends from Modelica.Icons.VariantsPackage (Icon for package containing variants).
Package Content
| Name | Description |
|---|---|
| PID controller with anti-windup, output limiter and output hysteresis | |
| PID controller with anti-windup, hysteresis and timer to prevent short cycling | |
| Collection of models that illustrate model use and test models |
 Buildings.Obsolete.Controls.Continuous.PIDHysteresis
Buildings.Obsolete.Controls.Continuous.PIDHysteresis
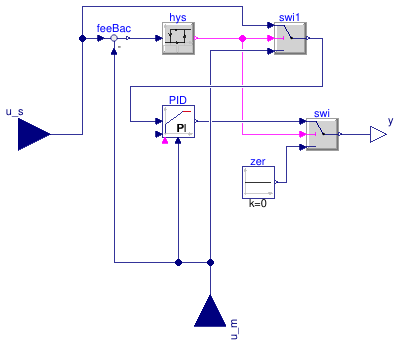
PID controller with anti-windup, output limiter and output hysteresis
Information
Block of a controller for set point tracking with a hysteresis element that switches the controller on and off.
If the controller is off, and the control error becomes larger than eOn, then
the controller switches to on and remains on until the control error is smaller than eOff.
When the controller is on, the set point tracking can be done using a P-, PI-, or PID-controller.
In its off-mode, the control output is zero. Thus, the parameters yMin and yMax are
used to constrain the output of the controller during its on mode only. This can be used, for
example, to modulate a device between 0.3 and 1.0, and switch it to off when the control error
is small enough.
Extends from Modelica.Blocks.Interfaces.SVcontrol (Single-Variable continuous controller), Buildings.Obsolete.BaseClasses.ObsoleteModel (Icon for classes that are obsolete and will be removed in later versions).
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Hysteresis | |||
| Real | eOn | 1 | if off and control error > eOn, switch to set point tracking |
| Real | eOff | -eOn | if on and control error < eOff, set y=0 |
| Boolean | pre_y_start | false | Value of hysteresis output at initial time |
| Set point tracking | |||
| SimpleController | controllerType | Modelica.Blocks.Types.Simple... | Type of controller |
| Real | k | 1 | Gain of controller |
| Time | Ti | Time constant of Integrator block [s] | |
| Time | Td | Time constant of Derivative block [s] | |
| Real | yMax | 1 | Upper limit of output |
| Real | yMin | 0 | Lower limit of output |
| Real | wp | 1 | Set-point weight for Proportional block (0..1) |
| Real | wd | 0 | Set-point weight for Derivative block (0..1) |
| Real | Ni | 0.9 | Ni*Ti is time constant of anti-windup compensation |
| Real | Nd | 10 | The higher Nd, the more ideal the derivative block |
| Boolean | reverseActing | true | Set to true for reverse acting, or false for direct acting control action |
| Initialization | |||
| Init | initType | Modelica.Blocks.Types.Init.I... | Type of initialization (1: no init, 2: steady state, 3: initial state, 4: initial output) |
| Real | xi_start | 0 | Initial or guess value value for integrator output (= integrator state) |
| Real | xd_start | 0 | Initial or guess value for state of derivative block |
| Real | y_start | 0 | Initial value of output |
| Advanced | |||
| Boolean | strict | true | = true, if strict limits with noEvent(..) |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | u_s | Connector of setpoint input signal |
| input RealInput | u_m | Connector of measurement input signal |
| output RealOutput | y | Connector of actuator output signal |
Modelica definition
 Buildings.Obsolete.Controls.Continuous.PIDHysteresisTimer
Buildings.Obsolete.Controls.Continuous.PIDHysteresisTimer
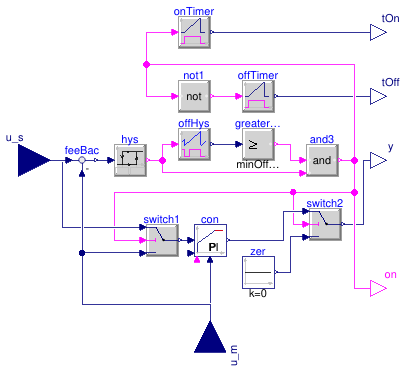
PID controller with anti-windup, hysteresis and timer to prevent short cycling
Information
Block of a controller for set point tracking with a hysteresis element that switches the controller on and off, and a timer that prevents the controller to short cycle.
The controller is similar to
Buildings.Obsolete.Controls.Continuous.PIDHysteresis but in addition,
it has a timer that prevents the controller from switching to on
too fast. When the controller switches off, the timer starts and
avoids the controller from switching on until minOffTime seconds elapsed.
Extends from Modelica.Blocks.Interfaces.SVcontrol (Single-Variable continuous controller), Buildings.Obsolete.BaseClasses.ObsoleteModel (Icon for classes that are obsolete and will be removed in later versions).
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| On/off controller | |||
| Real | minOffTime | 600 | Minimum time that devices needs to be off before it can run again |
| Real | eOn | 1 | if off and control error > eOn, switch to set point tracking |
| Real | eOff | -eOn | if on and control error < eOff, set y=0 |
| Boolean | pre_y_start | false | Value of hysteresis output at initial time |
| Set point tracking | |||
| SimpleController | controllerType | Modelica.Blocks.Types.Simple... | Type of controller |
| Real | k | 1 | Gain of controller |
| Time | Ti | Time constant of Integrator block [s] | |
| Time | Td | Time constant of Derivative block [s] | |
| Real | yMax | 1 | Upper limit of modulating output |
| Real | yMin | 0.3 | Lower limit of modulating output (before switch to 0) |
| Real | wp | 1 | Set-point weight for Proportional block (0..1) |
| Real | wd | 0 | Set-point weight for Derivative block (0..1) |
| Real | Ni | 0.9 | Ni*Ti is time constant of anti-windup compensation |
| Real | Nd | 10 | The higher Nd, the more ideal the derivative block |
| Boolean | reverseActing | true | Set to true for reverse acting, or false for direct acting control action |
| Initialization | |||
| Init | initType | Modelica.Blocks.Types.Init.I... | Type of initialization (1: no init, 2: steady state, 3: initial state, 4: initial output) |
| Real | xi_start | 0 | Initial or guess value value for integrator output (= integrator state) |
| Real | xd_start | 0 | Initial or guess value for state of derivative block |
| Real | y_start | 0 | Initial value of output |
| Advanced | |||
| Boolean | strict | true | = true, if strict limits with noEvent(..) |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | u_s | Connector of setpoint input signal |
| input RealInput | u_m | Connector of measurement input signal |
| output RealOutput | y | Connector of actuator output signal |
| output RealOutput | tOn | Time since boiler switched on |
| output RealOutput | tOff | Time since boiler switched off |
| output BooleanOutput | on | Outputs true if boiler is on |