Buildings.Templates.Plants.Controls.Utilities
Package with utility blocks
Information
This package contains utility blocks that are used to implement the control sequences within Buildings.Templates.Plants.Controls.
Package Content
| Name | Description |
|---|---|
| Output the number of true elements in a Boolean array | |
| Hold value of real signal based on timer and Boolean signal | |
| Output the maximum element of the input vector | |
| Output the minimum element of the input vector | |
| PID controller with enable signal | |
| Output a placeholder signal | |
| Output a placeholder signal | |
| Output a placeholder signal | |
| Sort elements of input vector in ascending or descending order | |
| Evaluation of stage index from staging signals | |
| Timer measuring the time from the time instant where the Boolean input became true | |
| Output a Boolean array with a given number of true elements and a priority order | |
| Collection of validation models |
 Buildings.Templates.Plants.Controls.Utilities.CountTrue
Buildings.Templates.Plants.Controls.Utilities.CountTrue
Output the number of true elements in a Boolean array

Information
Counts the number of true elements in the Boolean
input vector.
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u1[nin] | Array of Boolean signals |
| output IntegerOutput | y | Index of first element being true |
Modelica definition
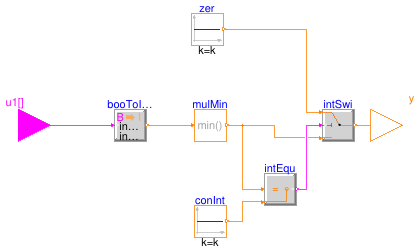
Buildings.Templates.Plants.Controls.Utilities.FirstTrueIndex
Information
Returns the index of the first true element of the Boolean
input vector.
If no element is true, the block returns 0.
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u1[nin] | Array of Boolean signals |
| output IntegerOutput | y | Index of first element being true |
Modelica definition
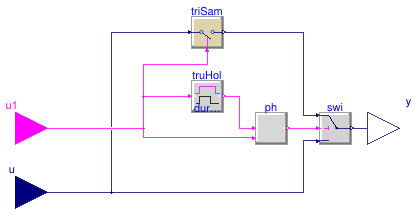
 Buildings.Templates.Plants.Controls.Utilities.HoldReal
Buildings.Templates.Plants.Controls.Utilities.HoldReal
Hold value of real signal based on timer and Boolean signal
Information
Holds input value fixed at its last value while the Boolean signal
u1 is true, and for at least the hold time dtHol.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Real | dtHol | 0 | Hold time [s] |
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u1 | Boolean signal that triggers fixed output value |
| input RealInput | u | Input signal |
| output RealOutput | y | Output signal |
Modelica definition
Buildings.Templates.Plants.Controls.Utilities.LastTrueIndex

Information
Returns the index of the last true element of the Boolean
input vector.
If no element is true, the block returns 0.
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u1[nin] | Array of Boolean signals |
| output IntegerOutput | y | Index of first element being true |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.MultiMaxInteger
Buildings.Templates.Plants.Controls.Utilities.MultiMaxInteger
Output the maximum element of the input vector
Information
Outputs the maximum element of the input vector.
Connectors
| Type | Name | Description |
|---|---|---|
| input IntegerInput | u[nin] | Integer input signal |
| output IntegerOutput | y | Integer output signal |
Modelica definition
Buildings.Templates.Plants.Controls.Utilities.MultiMinInteger
Output the minimum element of the input vector
Information
Outputs the minimum element of the input vector.
Connectors
| Type | Name | Description |
|---|---|---|
| input IntegerInput | u[nin] | Integer input signal |
| output IntegerOutput | y | Integer output signal |
Modelica definition
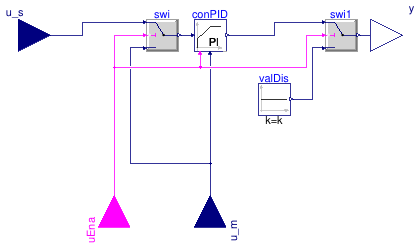
 Buildings.Templates.Plants.Controls.Utilities.PIDWithEnable
Buildings.Templates.Plants.Controls.Utilities.PIDWithEnable
PID controller with enable signal
Information
This is an update of Buildings.Controls.OBC.CDL.Reals.PIDWithReset with an additional enable signal provided as a Boolean input.
-
When enabled, the output of the controller is identical to
Buildings.Controls.OBC.CDL.Reals.PIDWithReset,
and the integral term is reset to
y_resetat enable time. -
When disabled, the output of the controller is set to
y_neutraland the setpoint is overridden by the measurement signal in order to avoid time integration of the control error.
Extends from Modelica.Blocks.Icons.Block (Basic graphical layout of input/output block).
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| SimpleController | controllerType | Buildings.Controls.OBC.CDL.T... | Type of controller |
| Real | k | 1 | Gain of controller |
| Time | Ti | 0.5 | Time constant of integrator block [s] |
| Time | Td | 0.1 | Time constant of derivative block [s] |
| Real | r | 1 | Typical range of control error, used for scaling the control error |
| Real | yMin | 0 | Lower limit of output |
| Real | yMax | 1 | Upper limit of output |
| Boolean | reverseActing | true | Set to true for reverse acting, or false for direct acting control action |
| Real | y_reset | yMin | Value to which the controller output is reset if the boolean trigger has a rising edge |
| Real | y_neutral | y_reset | Value to which the controller output is reset when the controller is disabled |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | u_s | Connector of setpoint input signal |
| input RealInput | u_m | Connector of measurement input signal |
| output RealOutput | y | Connector of actuator output signal |
| input BooleanInput | uEna | Enable signal |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.PlaceholderInteger
Buildings.Templates.Plants.Controls.Utilities.PlaceholderInteger
Output a placeholder signal
Information
This block enables replacing a variable that is conditionally removed with either a parameter or another input variable.
-
If the parameter
have_inpis true, the output variableyis equal to the input variableu. -
If the parameter
have_inpis false and the parameterhave_inpPhis true, the output variableyis equal to the input variableuPh. -
If the parameter
have_inpis false and the parameterhave_inpPhis false, the output variableyis equal to the parameteru_internal.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | have_inp | true | Set to true if input signal is available |
| Boolean | have_inpPh | false | Set to true if placeholder value is provided with input signal |
| Integer | u_internal | Placeholder value if input signal is not available |
Connectors
| Type | Name | Description |
|---|---|---|
| input IntegerInput | u | Input |
| input IntegerInput | uPh | Input |
| output IntegerOutput | y | Output |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.PlaceholderLogical
Buildings.Templates.Plants.Controls.Utilities.PlaceholderLogical
Output a placeholder signal
Information
This block enables replacing a variable that is conditionally removed with either a parameter or another input variable.
-
If the parameter
have_inpis true, the output variableyis equal to the input variableu. -
If the parameter
have_inpis false and the parameterhave_inpPhis true, the output variableyis equal to the input variableuPh. -
If the parameter
have_inpis false and the parameterhave_inpPhis false, the output variableyis equal to the parameteru_internal.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | have_inp | true | Set to true if input signal is available |
| Boolean | have_inpPh | false | Set to true if placeholder value is provided with input signal |
| Boolean | u_internal | Placeholder value if input signal is not available |
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u | Input |
| input BooleanInput | uPh | Input |
| output BooleanOutput | y | Output |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.PlaceholderReal
Buildings.Templates.Plants.Controls.Utilities.PlaceholderReal
Output a placeholder signal
Information
This block enables replacing a variable that is conditionally removed with either a parameter or another input variable.
-
If the parameter
have_inpis true, the output variableyis equal to the input variableu. -
If the parameter
have_inpis false and the parameterhave_inpPhis true, the output variableyis equal to the input variableuPh. -
If the parameter
have_inpis false and the parameterhave_inpPhis false, the output variableyis equal to the parameteru_internal.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | have_inp | true | Set to true if input signal is available |
| Boolean | have_inpPh | false | Set to true if placeholder value is provided with input signal |
| Real | u_internal | Placeholder value if input signal is not available |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Input |
| input RealInput | uPh | Input |
| output RealOutput | y | Output |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.SortWithIndices
Buildings.Templates.Plants.Controls.Utilities.SortWithIndices
Sort elements of input vector in ascending or descending order

Information
Block that sorts the elements of the input signal u.
If the parameter ascending = true, then the output signal y satisfies
yi <= yi+1 for all i ∈ {1, ..., n-1}.
Otherwise, it satisfies
yi >= yi+1 for all i ∈ {1, ..., n-1}.
The output signal yIdx contains the indices of the sorted elements,
with respect to the input vector u.
Usage
Note that this block shall only be used for input signals u that are
time sampled.
Otherwise, in simulation, numerical noise from a nonlinear solver or from an
implicit time integration algorithm may cause the simulation to stall.
Numerical noise can be present if an input depends
on a state variable or a quantity that requires an iterative solution,
such as a temperature or a mass flow rate of an HVAC system.
In real controllers, measurement noise may cause the output to change frequently.
This block may for example be used in a variable air volume flow controller to access the position of the dampers that are most open.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | ascending | true | Set to true if ascending order, otherwise order is descending |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | u[nin] | Connector of Real input signals |
| output RealOutput | y[nin] | Sorted vector |
| output IntegerOutput | yIdx[nin] | Indices of the sorted vector with respect to the original vector |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.StageIndex
Buildings.Templates.Plants.Controls.Utilities.StageIndex
Evaluation of stage index from staging signals
Information
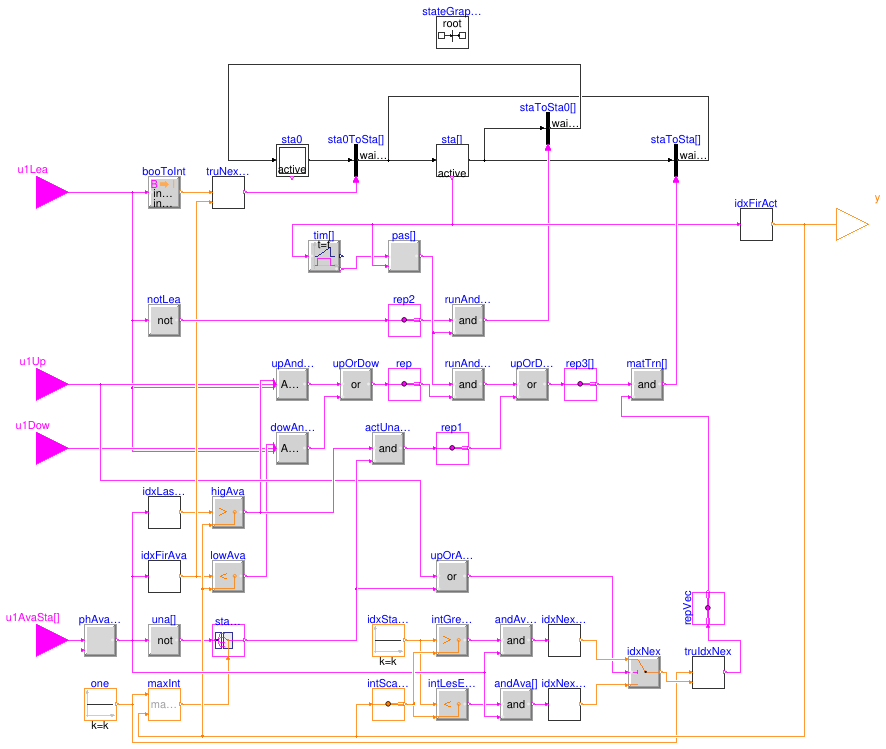
This block is used to compute the stage index for a group of multiple equipment such as CHW pumps or chillers.
-
At initial time, stage
0is active – all units are disabled. -
From stage
0, the transition to the next higher available stage is triggered when the lead unit is enabled (u1Lea = true) and if at least one stage is available. -
From any stage
i(1 ≤ i ≤ nSta), the transition to the next higher or lower available stagej(1 ≤ j ≤ nSta,j ≠ i) is triggered when stageihas been active for the minimum runtime and there is a stage up commandu1Upor stage down commandu1Dow, respectively. -
From any stage
i(1 ≤ i ≤ nSta), the transition to stage0is triggered when stageihas been active for the minimum runtime and the lead unit is disabled (u1Lea = false).
Unavailable stages are handled by the following requirements.
-
Any unavailable stage (
u1Ava[i] = false) is skipped during staging events. - If all higher (resp. lower) stages are unavailable, then the transition to a higher (resp. lower) stage is blocked.
- If the current stage is unavailable, the transition to the next higher available stage is triggered.
- Stage transitions due to availability conditions are not subject to the minimum stage runtime requirement.
Caveats
The only way to transition to stage 0 is by disabling the lead unit
(u1Lea = false).
The stage down command u1Dow cannot be used to transition
below stage 1.
When the current stage becomes unavailable, the transition to the next higher available stage is triggered. However, it can happen that equipment that is enabled at the current stage is no longer available while the current stage is not deemed unavailable – for example if a lead/lag alternate equipment remains available. In this case, the equipment rotation logic must stage on the lead/lag alternate equipment to replace the faulty equipment.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | have_inpAva | true | Set to true if stage availability is provided with input signal, false for stages always available |
| Integer | nSta | Number of stages | |
| Real | dtRun | 0 | Minimum runtime of each stage [s] |
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u1Lea | Lead unit enable signal |
| input BooleanInput | u1Up | Stage up command |
| input BooleanInput | u1Dow | Stage down command |
| input BooleanInput | u1AvaSta[nSta] | Stage available signal |
| output IntegerOutput | y | Stage index |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.TimerWithReset
Buildings.Templates.Plants.Controls.Utilities.TimerWithReset
Timer measuring the time from the time instant where the Boolean input became true

Information
This block is similar to
Buildings.Controls.OBC.CDL.Logical.Timer,
but introduces an additional Boolean input signal reset,
which resets the timer.
When reset becomes true:
y=0 and passed=false.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Real | t | 0 | Threshold time for comparison [s] |
Connectors
| Type | Name | Description |
|---|---|---|
| input BooleanInput | u | Input that switches timer on if true, and off if false |
| input BooleanInput | reset | Reset signal |
| output RealOutput | y | Elapsed time [s] |
| output BooleanOutput | passed | True if the elapsed time is greater than threshold |
Modelica definition
 Buildings.Templates.Plants.Controls.Utilities.TrueArrayConditional
Buildings.Templates.Plants.Controls.Utilities.TrueArrayConditional
Output a Boolean array with a given number of true elements and a priority order

Information
Accepts indices of true elements that may not be within the range of indices of the output vector. In this, the number of true elements will not be met.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Integer | nout | nin | Size of output array |
Connectors
| Type | Name | Description |
|---|---|---|
| input IntegerInput | u | Number of true elements |
| input IntegerInput | uIdx[nin] | Array of indices by order of priority to be true |
| output BooleanOutput | y1[nout] | Output |