Buildings.Fluid.HydronicConfigurations.Controls.Validation
Validation models
Information
This package contains validation models for the classes within Buildings.Fluid.HydronicConfigurations.Controls.
Extends from Modelica.Icons.ExamplesPackage (Icon for packages containing runnable examples).
Package Content
| Name | Description |
|---|---|
| Test model for PID controller with operating mode |
 Buildings.Fluid.HydronicConfigurations.Controls.Validation.PIDWithOperatingMode
Buildings.Fluid.HydronicConfigurations.Controls.Validation.PIDWithOperatingMode
Test model for PID controller with operating mode
Information
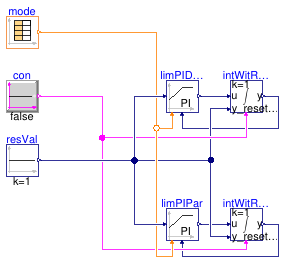
This model validates the block Buildings.Fluid.HydronicConfigurations.Controls.PIDWithOperatingMode configured either as a PI or as a PID controller.
Modelica definition
model PIDWithOperatingMode "Test model for PID controller with operating mode"
Buildings.Fluid.HydronicConfigurations.Controls.PIDWithOperatingMode limPIDPar(
controllerType=Buildings.Controls.OBC.CDL.Types.SimpleController.PID,
k=1,
Ti=1,
Td=1,
yMin=-1,
y_reset=0.5)
"Controller, reset to parameter value";
Buildings.Controls.OBC.CDL.Reals.IntegratorWithReset intWitRes1
"Integrator whose output should be brought to the set point";
Buildings.Controls.OBC.CDL.Reals.Sources.Constant resVal(k=1)
"Reset value";
Buildings.Fluid.HydronicConfigurations.Controls.PIDWithOperatingMode limPIPar(
k=1,
Ti=1,
Td=1,
yMin=-1,
y_reset=0.5)
"Controller, reset to parameter value";
Buildings.Controls.OBC.CDL.Reals.IntegratorWithReset intWitRes3
"Integrator whose output should be brought to the set point";
Buildings.Controls.OBC.CDL.Logical.Sources.Constant con(
final k=false)
"Constant false";
Buildings.Controls.OBC.CDL.Integers.Sources.TimeTable mode(table=[0,0; 1,0; 1,
1; 5,1; 5,2; 9,2; 9,0; 10,0], period=10)
"Operating mode";
equation
connect(intWitRes1.u,limPIDPar.y);
connect(intWitRes1.y,limPIDPar.u_m);
connect(intWitRes3.u,limPIPar.y);
connect(intWitRes3.y,limPIPar.u_m);
connect(resVal.y,intWitRes1.y_reset_in);
connect(resVal.y,intWitRes3.y_reset_in);
connect(con.y,intWitRes1.trigger);
connect(con.y,intWitRes3.trigger);
connect(mode.y[1], limPIDPar.mode);
connect(mode.y[1], limPIPar.mode);
connect(resVal.y, limPIDPar.u_s);
connect(resVal.y, limPIPar.u_s);
end PIDWithOperatingMode;