Buildings.Controls.OBC.RadiantSystems.Heating
Package with control sequences for radiant heating systems
Information
Package with controllers for radiant heating systems.
Extends from Modelica.Icons.Package (Icon for standard packages).
Package Content
| Name | Description |
|---|---|
| Room temperature controller for radiant heating with constant mass flow and variable supply temperature | |
| Collection of validation models |
 Buildings.Controls.OBC.RadiantSystems.Heating.HighMassSupplyTemperature_TRoom
Buildings.Controls.OBC.RadiantSystems.Heating.HighMassSupplyTemperature_TRoom
Room temperature controller for radiant heating with constant mass flow and variable supply temperature
Information
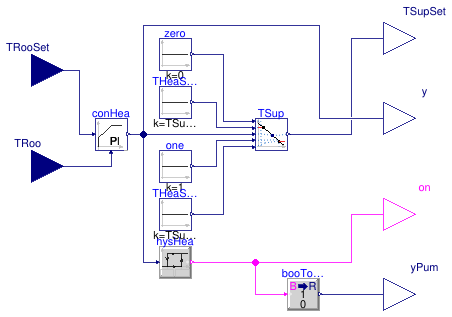
Controller for a radiant heating system.
The controller tracks the room temperature set point TRooSet by
adjusting the supply water temperature set point TSupSet linearly between
TSupSetMin and TSupSetMax
based on the output signal y of the proportional controller.
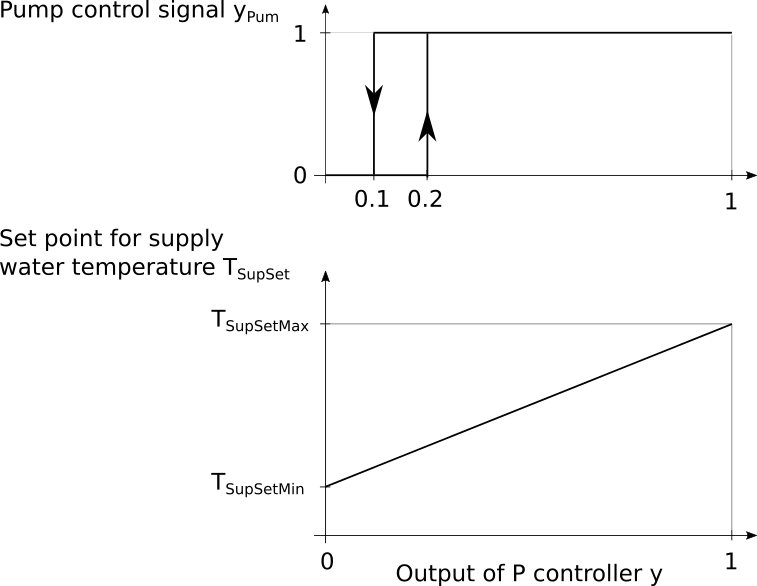
The pump is either off or operates at full speed, in which case yPum = 1.
The pump control is based on a hysteresis that switches the pump on when the output of the
proportional controller y exceeds 0.2, and the pump is commanded off when the output falls
below 0.1. See figure below for the control charts.
For systems with high thermal mass, this controller should be left configured as a P-controller, which is the default setting. PI-controller likely saturate due to the slow system response.
Parameters
| Type | Name | Default | Description |
|---|---|---|---|
| Real | TSupSet_max | Maximum heating supply water temperature [K] | |
| Real | TSupSet_min | 293.15 | Minimum heating supply water temperature [K] |
| Control gains | |||
| SimpleController | controllerType | Buildings.Controls.OBC.CDL.T... | Type of controller |
| Real | k | 2 | Gain of controller |
| Real | Ti | 3600 | Time constant of integrator block [s] |
| Real | Td | 0.1 | Time constant of derivative block [s] |
Connectors
| Type | Name | Description |
|---|---|---|
| input RealInput | TRooSet | Set point for room air temperature [K] |
| input RealInput | TRoo | Measured room air temperature [K] |
| output RealOutput | TSupSet | Set point for heating supply water temperature [K] |
| output RealOutput | y | Control signal for heating system from P controller [1] |
| output BooleanOutput | on | Outputs true if the system is demanded on |
| output RealOutput | yPum | Pump speed control signal [1] |