Production line with simple robots
Package Content
Information
Extends from Modelica.Icons.Example (Icon for runnable examples).
Modelica definition
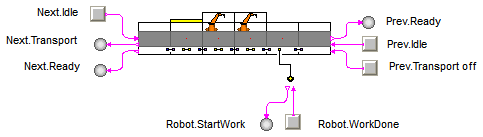
model MainSimple
extends Modelica.Icons.Example;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton3;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp3;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.StartTable
startTable;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table2;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.EndTable
endTable;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table3;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotHorizontal
robot;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotHorizontal
robot1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotTermHorizontal
robotTermHorizontal;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotComTerm
robotComTerm;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp1;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton2;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp2;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton1;
equation
connect(startTable.tableComNext, table.tableComPrev);
connect(table.robotComTable, robotTermHorizontal.robotComRobot);
connect(table2.robotComTable, robot1.robotComRobot);
connect(table2.tableComNext, table3.tableComPrev);
connect(table3.robotComTable, robotComTerm.robotComRobot);
connect(table3.tableComNext, endTable.tableComPrev);
connect(table2.tableComPrev, table1.tableComNext);
connect(table1.tableComPrev, table.tableComNext);
connect(robot.robotComRobot, table1.robotComTable);
connect(indicatorLamp.activePort, startTable.next_idle);
connect(trigButton.y, startTable.next_ready);
connect(indicatorLamp1.activePort, startTable.next_transport);
connect(trigButton2.y, endTable.prev_idle);
connect(indicatorLamp2.activePort, endTable.prev_ready);
connect(endTable.prev_transport, trigButton1.y);
connect(trigButton3.y, robotComTerm.u);
connect(robotComTerm.y, indicatorLamp3.activePort);
end MainSimple;
Information
Extends from Modelica.Icons.Example (Icon for runnable examples).
Modelica definition
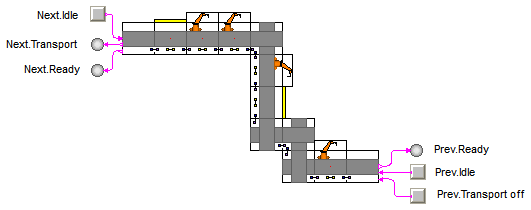
model MainExtended
extends Modelica.Icons.Example;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp1;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton2;
Modelica_StateGraph2.Blocks.MathBoolean.ShowValue indicatorLamp2;
Modelica_StateGraph2.Blocks.Interactive.TrigButton trigButton1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.StartTable
startTable;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.EndTable
endTable;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table2;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TurnTableRight
turnTableRight1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableVertical
tableDown;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableVertical
tableDown1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TurnTableLeft
turnTableLeft2;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TurnTableRight
turnTableRight;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TurnTableLeft
turnTableLeft;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
table1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotHorizontal
robot;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotTermHorizontal
robotTermHorizontal;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotTermVertical
robotTermVertical;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotVertical
robotDown;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotHorizontal
robot1;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Tables.TableHorizontal
tableHorizontal;
Modelica_StateGraph2.Examples.Applications.ProductionLine.Internal.Utilities.RobotHorizontal
robotHorizontal;
equation
connect(startTable.tableComNext, table.tableComPrev);
connect(table.robotComTable, robotTermHorizontal.robotComRobot);
connect(tableDown.robotComTable, robotDown.robotComRobot);
connect(tableDown1.robotComTable, robotTermVertical.robotComRobot);
connect(turnTableLeft2.tableComNext, turnTableRight.tableComPrev);
connect(turnTableLeft.tableComNext, table1.tableComPrev);
connect(table1.robotComTable, robot1.robotComRobot);
connect(table1.tableComNext, endTable.tableComPrev);
connect(tableHorizontal.robotComTable, robotHorizontal.robotComRobot);
connect(table2.robotComTable, robot.robotComRobot);
connect(tableHorizontal.tableComPrev, table.tableComNext);
connect(table2.tableComPrev, tableHorizontal.tableComNext);
connect(turnTableRight1.tableComPrev, table2.tableComNext);
connect(tableDown.tableComPrev, turnTableRight1.tableComNext);
connect(tableDown.tableComNext, tableDown1.tableComPrev);
connect(tableDown1.tableComNext, turnTableLeft2.tableComPrev);
connect(turnTableRight.tableComNext, turnTableLeft.tableComPrev);
connect(trigButton.y, startTable.next_ready);
connect(indicatorLamp.activePort, startTable.next_idle);
connect(indicatorLamp1.activePort, startTable.next_transport);
connect(indicatorLamp2.activePort, endTable.prev_ready);
connect(trigButton2.y, endTable.prev_idle);
connect(trigButton1.y, endTable.prev_transport);
end MainExtended;
Automatically generated Fri Nov 12 17:26:53 2010.
 Modelica_StateGraph2.Examples.Applications.ProductionLine.MainSimple
Modelica_StateGraph2.Examples.Applications.ProductionLine.MainSimple