Gates contains the basic gates according to standard logic as they are provided in the Basic package. Additionally they contain an InertialDelaySensitive component They are composed graphically, not using any equations.
Extends from Modelica.Icons.Package (Icon for standard packages).
| Name | Description |
|---|---|
| InvGate with 1 input value, composed by Not and sensitive intertial delay | |
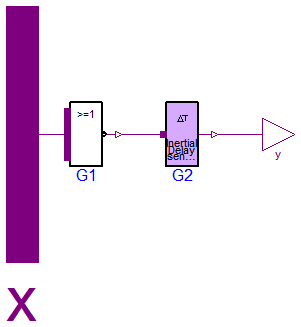
| AndGate with multiple input | |
| NandGate with multiple input | |
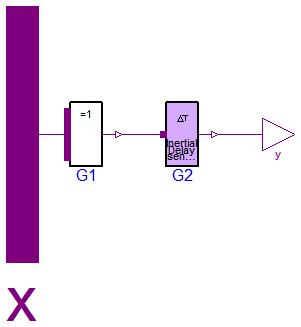
| OrGate with multiple input | |
| NorGate with multiple input | |
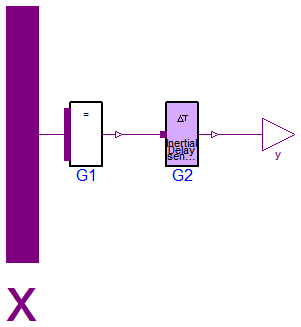
| XorGate with multiple input | |
| XnorGate with multiple input | |
| BufGate with 1 input value, composed by Not and sensitive intertial delay |
 Modelica.Electrical.Digital.Gates.InvGate
Modelica.Electrical.Digital.Gates.InvGate
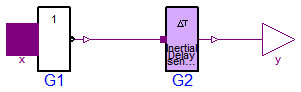
The InvGate model has a single valued input, and a single valued output. It is composed by a Basic Not and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.SISO (Single input, single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x | Connector of Digital input signal |
| output DigitalOutput | y | Connector of Digital output signal |
model InvGate "InvGate with 1 input value, composed by Not and sensitive intertial delay" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.SISO;D.Basic.Not G1; D.Delay.InertialDelaySensitive G2(tLH=tLH, tHL=tHL); equationconnect(G2.y, y); connect(G1.x, x); connect(G1.y, G2.x); end InvGate;
 Modelica.Electrical.Digital.Gates.AndGate
Modelica.Electrical.Digital.Gates.AndGate
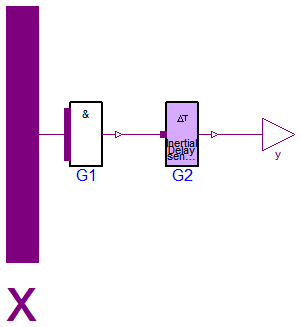
The AndGate model has a multiple valued (n) input vector, and a single valued output. It is composed by a Basic And and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Interfaces.MISO (Multiple input - single output), D.Delay.DelayParams (Definition of delay parameters).
| Type | Name | Default | Description |
|---|---|---|---|
| Integer | n | 2 | Number of inputs |
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model AndGate "AndGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Interfaces.MISO; extends D.Delay.DelayParams;D.Basic.And G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(y, G2.y); connect(G1.y, G2.x); end AndGate;
 Modelica.Electrical.Digital.Gates.NandGate
Modelica.Electrical.Digital.Gates.NandGate
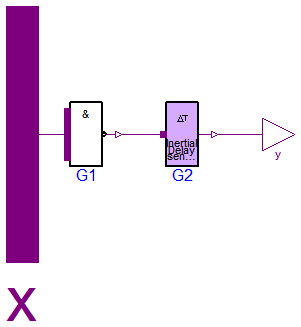
The NandGate model has a multiple valued (n) input vector, and a single valued output. It is composed by a Basic Nand and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model NandGate "NandGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Nand G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(G1.y, G2.x); connect(G2.y, y); end NandGate;
 Modelica.Electrical.Digital.Gates.OrGate
Modelica.Electrical.Digital.Gates.OrGate
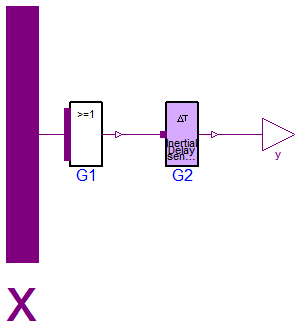
The OrGate model has a multiple valued (n) input vector, and a single valued output. It is composed by a Basic Or and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model OrGate "OrGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Or G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(G1.y, G2.x); connect(x,G1. x); connect(y, G2.y); end OrGate;
 Modelica.Electrical.Digital.Gates.NorGate
Modelica.Electrical.Digital.Gates.NorGate
The NorGate model has a multiple valued (n) input vector, and a single valued output. It is composed by a Basic Nor and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model NorGate "NorGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Nor G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(G1.y, G2.x); connect(x, G1.x); connect(y, G2.y); end NorGate;
 Modelica.Electrical.Digital.Gates.XorGate
Modelica.Electrical.Digital.Gates.XorGate
The XorGate model has a multiple valued (n) input vector, and a single valued output. It is composed by a Basic Xor and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model XorGate "XorGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Xor G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(G1.y, G2.x); connect(G2.y, y); end XorGate;
 Modelica.Electrical.Digital.Gates.XnorGate
Modelica.Electrical.Digital.Gates.XnorGate
The XnorGate model has a multiple valued (n) input vector, and a single valued output. It is composed by a Basic Xnor and an InertialDelaySensitive. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model XnorGate "XnorGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Xnor G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(G2.y, y); connect(G1.y, G2.x); end XnorGate;
 Modelica.Electrical.Digital.Gates.BufGate
Modelica.Electrical.Digital.Gates.BufGate
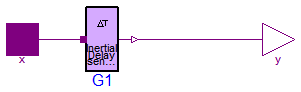
The BufGate model has a single valued input, and a single valued output. It consists of an InertialDelaySensitive only. Its parameters are the delay parameters (rise and fall intertial delay time, and intitial value).
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.SISO (Single input, single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | Rise inertial delay [s] | |
| Time | tHL | Fall inertial delay [s] | |
| Logic | y0 | L.'U' | Initial value of output |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x | Connector of Digital input signal |
| output DigitalOutput | y | Connector of Digital output signal |
model BufGate "BufGate with 1 input value, composed by Not and sensitive intertial delay" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.SISO;D.Delay.InertialDelaySensitive G1(tLH=tLH, tHL=tHL); equationconnect(G1.y, y); connect(G1.x, x); end BufGate;