| Name | Description |
|---|---|
| InvGate with 1 input value, composed by Not and sensitive intertial delay | |
| AndGate with multiple input | |
| NandGate with multiple input | |
| OrGate with multiple input | |
| NorGate with multiple input | |
| XorGate with multiple input | |
| XnorGate with multiple input | |
| BufGate with 1 input value, composed by Not and sensitive intertial delay |
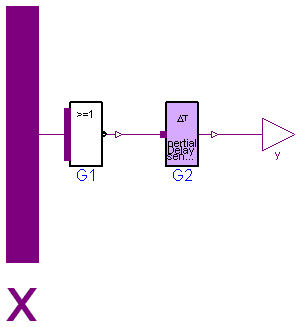
 Modelica.Electrical.Digital.Gates.InvGate
Modelica.Electrical.Digital.Gates.InvGate
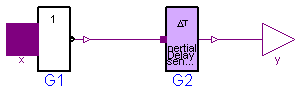
InvGate with 1 input value, composed by Not and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.SISO (Single input, single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x | Connector of Digital input signal |
| output DigitalOutput | y | Connector of Digital output signal |
model InvGate "InvGate with 1 input value, composed by Not and sensitive intertial delay" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.SISO;D.Basic.Not G1; D.Delay.InertialDelaySensitive G2(tLH=tLH, tHL=tHL); equationconnect(G2.y, y); connect(G1.x, x); connect(G1.y, G2.x); end InvGate;
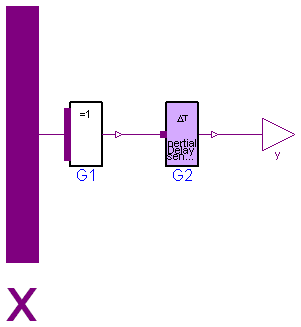
 Modelica.Electrical.Digital.Gates.AndGate
Modelica.Electrical.Digital.Gates.AndGate
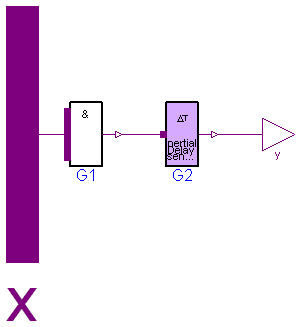
AndGate with n input values, composed by And and sensitive intertial delay.
Extends from D.Interfaces.MISO (Multiple input - single output), D.Delay.DelayParams (Definition of delay parameters).
| Type | Name | Default | Description |
|---|---|---|---|
| Integer | n | 2 | Number of inputs |
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model AndGate "AndGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Interfaces.MISO; extends D.Delay.DelayParams;D.Basic.And G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(y, G2.y); connect(G1.y, G2.x); end AndGate;
 Modelica.Electrical.Digital.Gates.NandGate
Modelica.Electrical.Digital.Gates.NandGate
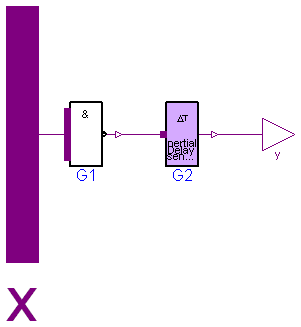
NandGate with n input values, composed by Nand and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model NandGate "NandGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Nand G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(G1.y, G2.x); connect(G2.y, y); end NandGate;
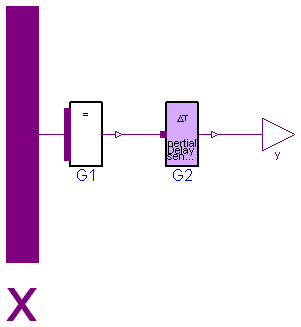
 Modelica.Electrical.Digital.Gates.OrGate
Modelica.Electrical.Digital.Gates.OrGate
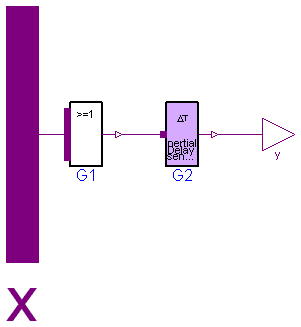
OrGate with n input values, composed by Or and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model OrGate "OrGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Or G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(G1.y, G2.x); connect(x,G1. x); connect(y, G2.y); end OrGate;
 Modelica.Electrical.Digital.Gates.NorGate
Modelica.Electrical.Digital.Gates.NorGate
NorGate with n input values, composed by Nor and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model NorGate "NorGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Nor G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(G1.y, G2.x); connect(x, G1.x); connect(y, G2.y); end NorGate;
 Modelica.Electrical.Digital.Gates.XorGate
Modelica.Electrical.Digital.Gates.XorGate
XorGate with n input values, composed by Xor and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model XorGate "XorGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Xor G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(G1.y, G2.x); connect(G2.y, y); end XorGate;
 Modelica.Electrical.Digital.Gates.XnorGate
Modelica.Electrical.Digital.Gates.XnorGate
XNorGate with n input values, composed by XNor and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.MISO (Multiple input - single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Integer | n | 2 | Number of inputs |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x[n] | Connector of Digital input signal vector |
| output DigitalOutput | y | Connector of Digital output signal |
model XnorGate "XnorGate with multiple input" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.MISO;D.Basic.Xnor G1(final n=n); D.Delay.InertialDelaySensitive G2( tLH=tLH, tHL=tHL, y0=y0); equationconnect(x, G1.x); connect(G2.y, y); connect(G1.y, G2.x); end XnorGate;
 Modelica.Electrical.Digital.Gates.BufGate
Modelica.Electrical.Digital.Gates.BufGate
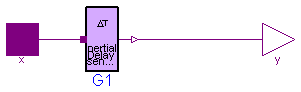
BufGate with 1 input value, composed by Not and sensitive intertial delay.
Extends from D.Delay.DelayParams (Definition of delay parameters), D.Interfaces.SISO (Single input, single output).
| Type | Name | Default | Description |
|---|---|---|---|
| Time | tLH | rise inertial delay [s] | |
| Time | tHL | fall inertial delay [s] | |
| Logic | y0 | L.'U' | initial value of output |
| Type | Name | Description |
|---|---|---|
| input DigitalInput | x | Connector of Digital input signal |
| output DigitalOutput | y | Connector of Digital output signal |
model BufGate "BufGate with 1 input value, composed by Not and sensitive intertial delay" import D = Modelica.Electrical.Digital; extends D.Delay.DelayParams; extends D.Interfaces.SISO;D.Delay.InertialDelaySensitive G1(tLH=tLH, tHL=tHL); equationconnect(G1.y, y); connect(G1.x, x); end BufGate;