Sequences for primary pumps
Information
This package contains control sequences for primary pumps.
Package Content
| Name |
Description |
 DisableDedicated DisableDedicated
|
Pump disable for plants with dedicated primary pumps |
 EnableLeadHeadered EnableLeadHeadered
|
Lead primary pump enable/disable for plants with headered primary pumps |
 VariableSpeed VariableSpeed
|
Variable speed primary pumps |
 Validation Validation
|
Collection of validation models |
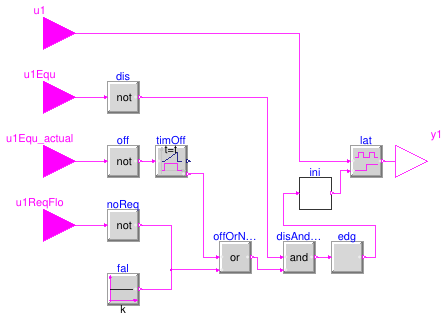
Pump disable for plants with dedicated primary pumps
Information
The pump is disabled when the associated plant equipment is disabled and:
-
if the equipment has a flow request network point
(
have_req=true): either the equipment has been proven
off for dtOff or is not requesting flow.
-
otherwise (
have_req=false): the equipment has been
proven off for dtOff.
When the flow request point is available, the default value for the pump
disable delay dtOff is increased from 3 min
to 10 min to ensure that flow is not cut off too soon.
Details
Used in Guideline 36 for disabling
dedicated primary pumps in chiller and boiler plants.
The enable signal u1 is yielded by the staging event sequencing logic.
Parameters
| Type | Name | Default | Description |
|---|
| Boolean | have_reqFlo | false | Set to true if plant equipment provides flow request point via network interface |
| Real | dtOff | if not have_reqFlo then 3*60... | Runtime with lead equipment proven off before disabling [s] |
Connectors
Modelica definition
block DisableDedicated
parameter Boolean have_reqFlo=false
;
parameter Real dtOff(
min=0,
unit="s")=
if not have_reqFlo
then 3 * 60
else 10 * 60
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1ReqFlo
if have_reqFlo
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1Equ
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1Equ_actual
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanOutput y1
;
Buildings.Controls.OBC.CDL.Logical.Latch lat
;
Buildings.Controls.OBC.CDL.Logical.Not dis
;
Buildings.Controls.OBC.CDL.Logical.Not off
;
Buildings.Controls.OBC.CDL.Logical.Sources.Constant fal(
final k=false)
if not have_reqFlo
;
Buildings.Controls.OBC.CDL.Logical.Or offOrNotReq
;
Buildings.Controls.OBC.CDL.Logical.Timer timOff(
final t=dtOff)
;
Buildings.Controls.OBC.CDL.Logical.And disAndOffOrNotReq
;
Buildings.Controls.OBC.CDL.Logical.Edge edg
;
Buildings.Controls.OBC.CDL.Logical.Not noReq
if have_reqFlo
;
Utilities.Initialization ini(
final yIni=false)
;
equation
connect(lat.y, y1);
connect(u1, lat.u);
connect(u1Equ, dis.u);
connect(u1Equ_actual, off.u);
connect(fal.y, offOrNotReq.u2);
connect(off.y, timOff.u);
connect(timOff.passed, offOrNotReq.u1);
connect(u1ReqFlo, noReq.u);
connect(noReq.y, offOrNotReq.u2);
connect(dis.y, disAndOffOrNotReq.u1);
connect(offOrNotReq.y, disAndOffOrNotReq.u2);
connect(disAndOffOrNotReq.y, edg.u);
connect(edg.y, ini.u);
connect(ini.y, lat.clr);
end DisableDedicated;
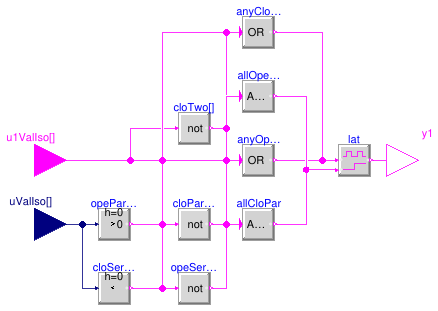
Lead primary pump enable/disable for plants with headered primary pumps
Information
Plants with parallel piped equipment
The lead primary pump is enabled when any equipment isolation valve is commanded open.
The lead primary pump is disabled when all equipment isolation valves are commanded closed.
For modulating valves, the "valve commanded open"
condition is evaluated based on a command signal > 0 %.
The "valve commanded closed" condition is evaluated as the negation of the previous condition.
Plants with series piped equipment
The lead primary pump is enabled when any equipment isolation valve is commanded closed.
The lead primary pump is disabled when all equipment isolation valves are commanded open.
For modulating valves, the "valve commanded closed"
condition is evaluated based on a command signal < 100 %.
The "valve commanded open" condition is evaluated as the negation of the previous condition.
Details
This logic is prescribed in ASHRAE, 2021 for:
-
headered primary pumps in chiller plants with parallel chillers
and without a waterside economizer,
-
primary pumps in chiller plants with series chillers
and without a waterside economizer,
-
headered primary pumps in boiler plants.
The valve command is used in contrast to the feedback of the
valve position or the end switch status, as prescribed by Guideline 36.
This is for the sake of simplicity, as there is no harm in deadheading the pump
for a couple seconds and it simplifies the programming.
For modulating valves, the "valve commanded open/closed" condition is
evaluated without hysteresis because the
valve command signal is generated by the
enabling or staging logic and both use minimum runtime conditions.
Therefore, the valve command signal is not subject to any oscillatory
behavior.
References
-
ASHRAE, 2021. Guideline 36-2021, High-Performance Sequences of Operation
for HVAC Systems. Atlanta, GA.
Parameters
| Type | Name | Default | Description |
|---|
| EquipmentConnection | typCon | | Type of connection between equipment and primary loop |
| Actuator | typValIso | Buildings.Templates.Plants.C... | Type of isolation valve |
| Integer | nValIso | | Number of isolation valves |
Connectors
| Type | Name | Description |
|---|
| input BooleanInput | u1ValIso[nValIso] | Isolation valve command |
| input RealInput | uValIso[nValIso] | Isolation valve command |
| output BooleanOutput | y1 | Lead pump enable signal |
Modelica definition
block EnableLeadHeadered
parameter Buildings.Templates.Plants.Controls.Types.EquipmentConnection typCon
;
parameter Buildings.Templates.Plants.Controls.Types.Actuator typValIso=
Buildings.Templates.Plants.Controls.Types.Actuator.TwoPosition
;
parameter Integer nValIso(
final min=1)
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1ValIso[nValIso]
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.TwoPosition
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput uValIso[nValIso]
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.Modulating
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanOutput y1
;
Buildings.Controls.OBC.CDL.Logical.MultiOr anyOpePar(
nin=nValIso)
if typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Parallel
;
Buildings.Controls.OBC.CDL.Logical.MultiAnd allCloPar(
nin=nValIso)
if typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Parallel
;
Buildings.Controls.OBC.CDL.Logical.Not cloParMod[nValIso]
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.Modulating
and typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Parallel
;
Buildings.Controls.OBC.CDL.Reals.GreaterThreshold opeParMod[nValIso](
each final t=0)
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.Modulating
and typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Parallel
;
Buildings.Controls.OBC.CDL.Logical.Latch lat
;
Buildings.Controls.OBC.CDL.Logical.MultiOr anyCloSer(
nin=nValIso)
if typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Series
;
Buildings.Controls.OBC.CDL.Logical.MultiAnd allOpeSer(
nin=nValIso)
if typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Series
;
Buildings.Controls.OBC.CDL.Reals.LessThreshold cloSerMod[nValIso](
each final t=0.99)
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.Modulating
and typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Series
;
Buildings.Controls.OBC.CDL.Logical.Not opeSerMod[nValIso]
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.Modulating
and typCon == Buildings.Templates.Plants.Controls.Types.EquipmentConnection.Series
;
Buildings.Controls.OBC.CDL.Logical.Not cloTwo[nValIso]
if typValIso == Buildings.Templates.Plants.Controls.Types.Actuator.TwoPosition
;
equation
connect(uValIso, opeParMod.u);
connect(opeParMod.y, cloParMod.u);
connect(lat.y, y1);
connect(anyOpePar.y, lat.u);
connect(allCloPar.y, lat.clr);
connect(allOpeSer.y, lat.clr);
connect(anyCloSer.y, lat.u);
connect(uValIso, cloSerMod.u);
connect(cloSerMod.y, opeSerMod.u);
connect(u1ValIso, cloTwo.u);
connect(cloTwo.y, anyCloSer.u);
connect(u1ValIso, anyOpePar.u);
connect(cloTwo.y, allCloPar.u);
connect(u1ValIso, allOpeSer.u);
connect(cloParMod.y, allCloPar.u);
connect(cloSerMod.y, anyCloSer.u);
connect(opeSerMod.y, allOpeSer.u);
connect(opeParMod.y, anyOpePar.u);
end EnableLeadHeadered;
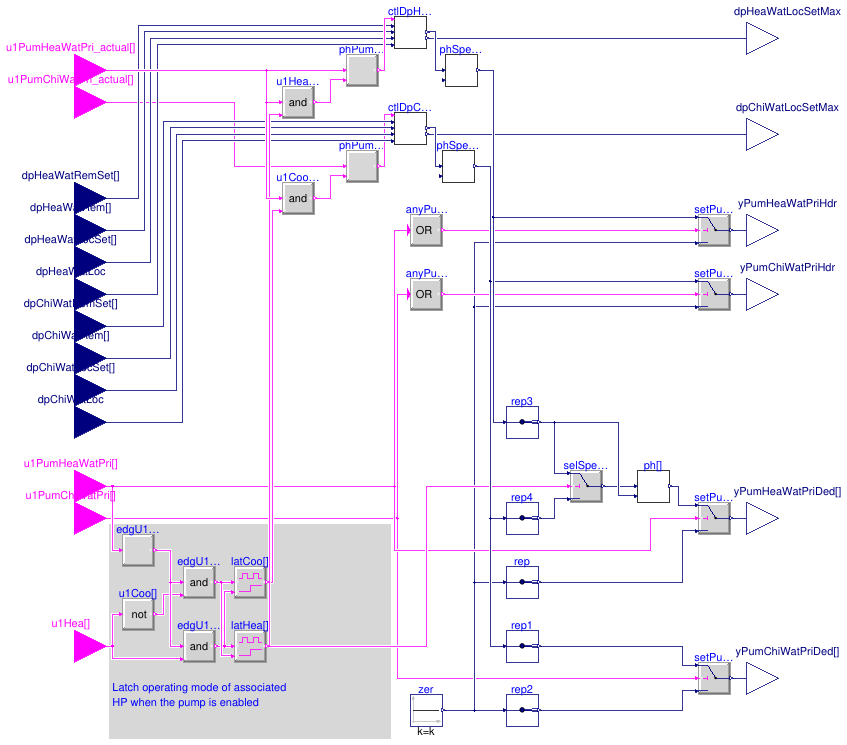
Variable speed primary pumps
Information
Plants with variable speed primary pumps that are not controlled to maintain differential pressure or flow setpoint
Heating-only plants
When commanded on, the primary HW pumps are commanded at a fixed
speed yPumHeaWatPriSet, as determined during the Testing, Adjusting,
and Balancing phase to provide the design heat pump flow.
Cooling-only plants
When commanded on, the primary CHW pumps are commanded at a fixed
speed yPumChiWatPriSet, as determined during the Testing, Adjusting,
and Balancing phase to provide the design heat pump flow.
Heating and cooling plants with common primary CHW and HW pumps
When commanded on, the primary pumps are commanded at a fixed
speed yPumHeaWatPriSet in heating mode or
yPumChiWatPriSet in cooling mode, as determined during the
Testing, Adjusting, and Balancing phase to provide the design heat pump flow
in heating mode or cooling mode.
The operating mode of the associated heat pump is determined and
latched at the time the pump is enabled.
Heating and cooling plants with separate primary CHW and HW pumps
When commanded on, the primary HW pumps are commanded at a fixed
speed yPumHeaWatPriSet.
When commanded on, the primary CHW pumps are commanded at a fixed
speed yPumChiWatPriSet.
The pump speed yPumHeaWatPriSet or yPumChiWatPriSet
is determined during the Testing, Adjusting, and Balancing phase to provide
the design heat pump flow in heating mode or cooling mode.
Plants with variable speed primary pumps that are controlled to maintain differential pressure or flow setpoint
Heating-only plants
The pumps are controlled as described in
Buildings.Templates.Plants.Controls.Pumps.Generic.ControlDifferentialPressure.
The "pump proven on" condition is evaluated based on the primary HW pump status.
Cooling-only plants
The pumps are controlled as described in
Buildings.Templates.Plants.Controls.Pumps.Generic.ControlDifferentialPressure.
The "pump proven on" condition is evaluated based on the primary CHW pump status.
Heating and cooling plants with common primary CHW and HW pumps
The pumps are controlled as described in
Buildings.Templates.Plants.Controls.Pumps.Generic.ControlDifferentialPressure.
For the HW loop, the "pump proven on" condition is evaluated based on the status
of the primary pumps associated with heat pumps that are commanded in
heating mode.
For the CHW loop, the "pump proven on" condition is evaluated based on the status
of the primary pumps associated with heat pumps that are commanded in
cooling mode.
The operating mode of the associated heat pump is determined and
latched at the time the pump is enabled.
Heating and cooling plants with separate primary CHW and HW pumps
The pumps are controlled as described in
Buildings.Templates.Plants.Controls.Pumps.Generic.ControlDifferentialPressure.
For the HW loop, the "pump proven on" condition is evaluated based on the status
of the primary HW pumps.
For the CHW loop, the "pump proven on" condition is evaluated based on the status
of the primary CHW pumps.
Parameters
| Type | Name | Default | Description |
|---|
| Plant configuration |
| Boolean | have_heaWat | | Set to true for plants that provide HW |
| Boolean | have_chiWat | | Set to true for plants that provide CHW |
| Boolean | have_pumPriCtlDp | | Set to true for primary variable speed pumps using ∆p pump speed control |
| Boolean | have_pumChiWatPriDed | | Set to true for plants with separate dedicated primary CHW pumps |
| Boolean | have_pumPriHdr | | Set to true for headered primary pumps, false for dedicated pumps |
| Integer | nEqu | | Number of equipment |
| Integer | nPumHeaWatPri | | Number of primary HW pumps |
| Integer | nPumChiWatPri | | Number of primary CHW pumps |
| Boolean | have_senDpHeaWatRemWir | | Set to true for remote HW differential pressure sensor(s) hardwired to controller |
| Integer | nSenDpHeaWatRem | | Number of remote HW differential pressure sensors used for pump speed control |
| Boolean | have_senDpChiWatRemWir | | Set to true for remote CHW differential pressure sensor(s) hardwired to controller |
| Integer | nSenDpChiWatRem | | Number of remote CHW differential pressure sensors used for pump speed control |
| Information provided by testing, adjusting, and balancing contractor |
| Real | yPumHeaWatPriSet | | Primary pump speed providing design heat pump flow in heating mode [1] |
| Real | yPumChiWatPriSet | | Primary pump speed providing design heat pump flow in cooling mode [1] |
| Real | yPumHeaWatPri_min | 0.1 | Minimum primary HW pump speed [1] |
| Real | yPumChiWatPri_min | 0.1 | Minimum primary CHW pump speed [1] |
| Control gains |
| Real | kCtlDpHeaWat | 1 | Gain of controller for HW loop ∆p control |
| Real | TiCtlDpHeaWat | 60 | Time constant of integrator block for HW loop ∆p control [s] |
| Real | kCtlDpChiWat | 1 | Gain of controller for CHW loop ∆p control |
| Real | TiCtlDpChiWat | 60 | Time constant of integrator block for CHW loop ∆p control [s] |
Connectors
| Type | Name | Description |
|---|
| input BooleanInput | u1PumHeaWatPri[nPumHeaWatPri] | Primary HW pump start command |
| output RealOutput | yPumHeaWatPriHdr | Headered primary HW pump speed command |
| input BooleanInput | u1PumChiWatPri[nPumChiWatPri] | Primary CHW pump start command |
| output RealOutput | yPumChiWatPriHdr | Headered primary CHW pump speed command |
| output RealOutput | yPumHeaWatPriDed[nPumHeaWatPri] | Dedicated primary HW pump speed command |
| output RealOutput | yPumChiWatPriDed[nPumChiWatPri] | Dedicated primary CHW pump speed command |
| input BooleanInput | u1Hea[nEqu] | Heating/cooling mode command |
| input BooleanInput | u1PumHeaWatPri_actual[nPumHeaWatPri] | Primary HW pump status |
| input BooleanInput | u1PumChiWatPri_actual[nPumChiWatPri] | Primary CHW pump status |
| input RealInput | dpChiWatLoc | Local CHW differential pressure [Pa] |
| input RealInput | dpChiWatLocSet[nSenDpChiWatRem] | Local CHW differential pressure setpoint output from each of the remote loops [Pa] |
| input RealInput | dpChiWatRem[nSenDpChiWatRem] | Remote CHW differential pressure [Pa] |
| input RealInput | dpHeaWatLoc | Local HW differential pressure [Pa] |
| input RealInput | dpHeaWatLocSet[nSenDpHeaWatRem] | Local HW differential pressure setpoint output from each of the remote loops [Pa] |
| input RealInput | dpHeaWatRem[nSenDpHeaWatRem] | Remote HW differential pressure [Pa] |
| input RealInput | dpHeaWatRemSet[nSenDpHeaWatRem] | Remote HW differential pressure setpoint [Pa] |
| input RealInput | dpChiWatRemSet[nSenDpChiWatRem] | Remote CHW differential pressure setpoint [Pa] |
| output RealOutput | dpHeaWatLocSetMax | Maximum HW local differential pressure setpoint [Pa] |
| output RealOutput | dpChiWatLocSetMax | Maximum CHW local differential pressure setpoint [Pa] |
Modelica definition
block VariableSpeed
parameter Boolean have_heaWat
;
parameter Boolean have_chiWat
;
parameter Boolean have_pumPriCtlDp
;
final parameter Boolean have_pumHeaWatPri=have_heaWat
;
parameter Boolean have_pumChiWatPriDed(
start=false)
;
final parameter Boolean have_pumChiWatPri=have_chiWat
and (have_pumPriHdr
or have_pumChiWatPriDed)
;
parameter Boolean have_pumPriHdr
;
parameter Integer nEqu(
start=0)
;
parameter Integer nPumHeaWatPri
;
parameter Integer nPumChiWatPri(
start=
if have_pumChiWatPri
then nEqu
else 0)
;
parameter Real yPumHeaWatPriSet(
max=2,
min=0,
start=1,
unit="1")
;
parameter Real yPumChiWatPriSet(
max=2,
min=0,
start=1,
unit="1")
;
parameter Boolean have_senDpHeaWatRemWir(
start=false)
;
parameter Integer nSenDpHeaWatRem(
start=0)
;
parameter Real yPumHeaWatPri_min(
max=1,
min=0,
start=0.1,
unit="1")=0.1
;
parameter Real kCtlDpHeaWat(
min=100 * Buildings.Controls.OBC.CDL.Constants.eps,
start=1)=1
;
parameter Real TiCtlDpHeaWat(
min=100 * Buildings.Controls.OBC.CDL.Constants.eps,
start=60,
unit="s")=60
;
parameter Boolean have_senDpChiWatRemWir(
start=false)
;
parameter Integer nSenDpChiWatRem(
start=0)
;
parameter Real yPumChiWatPri_min(
max=1,
min=0,
start=0.1,
unit="1")=0.1
;
parameter Real kCtlDpChiWat(
min=100 * Buildings.Controls.OBC.CDL.Constants.eps,
start=1)=1
;
parameter Real TiCtlDpChiWat(
min=100 * Buildings.Controls.OBC.CDL.Constants.eps,
start=60,
unit="s")=60
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1PumHeaWatPri[nPumHeaWatPri]
if have_pumHeaWatPri
;
Buildings.Controls.OBC.CDL.Interfaces.RealOutput yPumHeaWatPriHdr
if have_pumHeaWatPri
and have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1PumChiWatPri[nPumChiWatPri]
if have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Interfaces.RealOutput yPumChiWatPriHdr
if have_pumChiWatPri
and have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Interfaces.RealOutput yPumHeaWatPriDed[nPumHeaWatPri]
if have_pumHeaWatPri
and not have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Interfaces.RealOutput yPumChiWatPriDed[nPumChiWatPri]
if have_pumChiWatPri
and not have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1Hea[nEqu]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Reals.Switch setPumChiWatPriDed[nPumChiWatPri]
if have_pumChiWatPri
and not have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Reals.Sources.Constant zer(
final k=0)
;
Buildings.Controls.OBC.CDL.Reals.Switch setPumHeaWatPriDed[nPumHeaWatPri]
if have_pumHeaWatPri
and not have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Routing.RealScalarReplicator rep(
nout=nPumHeaWatPri)
if have_pumHeaWatPri
;
Buildings.Controls.OBC.CDL.Routing.RealScalarReplicator rep1(
nout=nPumChiWatPri)
if have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Routing.RealScalarReplicator rep2(
nout=nPumChiWatPri)
if have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Reals.Switch setPumChiWatPriHdr
if have_pumChiWatPri
and have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Reals.Switch setPumHeaWatPriHdr
if have_pumHeaWatPri
and have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Logical.MultiOr anyPumChiWatPri(
nin=nPumChiWatPri)
if have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.MultiOr anyPumHeaWatPri(
nin=nPumHeaWatPri)
if have_pumHeaWatPri
;
Buildings.Controls.OBC.CDL.Reals.Switch selSpeHea[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
and not have_pumPriHdr
;
Buildings.Controls.OBC.CDL.Routing.RealScalarReplicator rep3(
nout=nPumHeaWatPri)
if have_heaWat
;
Buildings.Controls.OBC.CDL.Routing.RealScalarReplicator rep4(
nout=nPumHeaWatPri)
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
and not have_pumPriHdr
;
Utilities.PlaceholderReal ph[nPumHeaWatPri](
each final have_inp=have_heaWat
and have_chiWat
and not have_pumChiWatPri
and not have_pumPriHdr,
each final have_inpPh=true)
if have_pumHeaWatPri
and not have_pumPriHdr
;
Generic.ControlDifferentialPressure ctlDpHeaWat(
final have_senDpRemWir=have_senDpHeaWatRemWir,
final k=kCtlDpHeaWat,
final nPum=nPumHeaWatPri,
final nSenDpRem=nSenDpHeaWatRem,
final Ti=TiCtlDpHeaWat,
final y_min=yPumHeaWatPri_min)
if have_heaWat
and have_pumPriCtlDp
;
Utilities.PlaceholderReal phSpePumHeaWatPri(
final have_inp=have_pumPriCtlDp,
final have_inpPh=false,
final u_internal=yPumHeaWatPriSet)
if have_heaWat
;
Generic.ControlDifferentialPressure ctlDpChiWat(
final have_senDpRemWir=have_senDpChiWatRemWir,
final k=kCtlDpChiWat,
final nPum=
if have_pumChiWatPri
then nPumChiWatPri
else nPumHeaWatPri,
final nSenDpRem=nSenDpChiWatRem,
final Ti=TiCtlDpChiWat,
final y_min=
if have_pumChiWatPri
then yPumChiWatPri_min
else yPumHeaWatPri_min)
if have_chiWat
and have_pumPriCtlDp
;
Utilities.PlaceholderReal phSpePumChiWatPri(
final have_inp=have_pumPriCtlDp,
final have_inpPh=false,
final u_internal=yPumChiWatPriSet)
if have_chiWat
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1PumHeaWatPri_actual[nPumHeaWatPri]
if have_pumHeaWatPri
and have_pumPriCtlDp
;
Buildings.Controls.OBC.CDL.Interfaces.BooleanInput u1PumChiWatPri_actual[nPumChiWatPri]
if have_pumChiWatPri
and have_pumPriCtlDp
;
Buildings.Controls.OBC.CDL.Logical.Not u1Coo[nEqu]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.And u1CooAndOn[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
and have_pumPriCtlDp
;
Utilities.PlaceholderLogical phPumChiWatPriSta[
if have_pumChiWatPri
then nPumChiWatPri
else nPumHeaWatPri](
each final have_inp=have_pumChiWatPri,
each final have_inpPh=true)
if have_chiWat
and have_pumPriCtlDp
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpChiWatLoc(
final unit="Pa")
if have_chiWat
and have_pumPriCtlDp
and not have_senDpChiWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpChiWatLocSet[nSenDpChiWatRem](
each final unit="Pa")
if have_chiWat
and have_pumPriCtlDp
and not have_senDpChiWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpChiWatRem[nSenDpChiWatRem](
each final unit="Pa")
if have_chiWat
and have_pumPriCtlDp
and have_senDpChiWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpHeaWatLoc(
final unit="Pa")
if have_heaWat
and have_pumPriCtlDp
and not have_senDpHeaWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpHeaWatLocSet[nSenDpHeaWatRem](
each final unit="Pa")
if have_heaWat
and have_pumPriCtlDp
and not have_senDpHeaWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpHeaWatRem[nSenDpHeaWatRem](
each final unit="Pa")
if have_heaWat
and have_pumPriCtlDp
and have_senDpHeaWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpHeaWatRemSet[nSenDpHeaWatRem](
each final unit="Pa")
if have_heaWat
and have_pumPriCtlDp
and have_senDpHeaWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealInput dpChiWatRemSet[nSenDpChiWatRem](
each final unit="Pa")
if have_chiWat
and have_pumPriCtlDp
and have_senDpChiWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealOutput dpHeaWatLocSetMax(
final unit="Pa")
if have_heaWat
and have_pumPriCtlDp
and not have_senDpHeaWatRemWir
;
Buildings.Controls.OBC.CDL.Interfaces.RealOutput dpChiWatLocSetMax(
final unit="Pa")
if have_chiWat
and have_pumPriCtlDp
and not have_senDpChiWatRemWir
;
Buildings.Controls.OBC.CDL.Logical.Latch latCoo[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.Edge edgU1PumHeaWatPri[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.And edgU1Coo[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.And edgU1AndHea[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.Latch latHea[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
;
Buildings.Controls.OBC.CDL.Logical.And u1HeaAndOn[nPumHeaWatPri]
if have_heaWat
and have_chiWat
and not have_pumChiWatPri
and have_pumPriCtlDp
;
Utilities.PlaceholderLogical phPumHeaWatPriSta[nPumHeaWatPri](
each final have_inp=have_chiWat
and have_pumChiWatPri
or not have_chiWat,
each final have_inpPh=true)
if have_heaWat
and have_pumPriCtlDp
;
equation
connect(u1PumChiWatPri, setPumChiWatPriDed.u2);
connect(setPumChiWatPriDed.y, yPumChiWatPriDed);
connect(setPumHeaWatPriDed.y, yPumHeaWatPriDed);
connect(zer.y, rep.u);
connect(zer.y, rep2.u);
connect(setPumHeaWatPriHdr.y, yPumHeaWatPriHdr);
connect(setPumChiWatPriHdr.y, yPumChiWatPriHdr);
connect(rep2.y, setPumChiWatPriDed.u3);
connect(rep1.y, setPumChiWatPriDed.u1);
connect(zer.y, setPumChiWatPriHdr.u3);
connect(rep.y, setPumHeaWatPriDed.u3);
connect(zer.y, setPumHeaWatPriHdr.u3);
connect(u1PumChiWatPri, anyPumChiWatPri.u);
connect(u1PumHeaWatPri, anyPumHeaWatPri.u);
connect(anyPumHeaWatPri.y, setPumHeaWatPriHdr.u2);
connect(anyPumChiWatPri.y, setPumChiWatPriHdr.u2);
connect(u1PumHeaWatPri, setPumHeaWatPriDed.u2);
connect(rep3.y, selSpeHea.u1);
connect(ph.y, setPumHeaWatPriDed.u1);
connect(selSpeHea.y, ph.u);
connect(u1Hea, u1Coo.u);
connect(u1PumChiWatPri_actual, phPumChiWatPriSta.u);
connect(phPumChiWatPriSta.y, ctlDpChiWat.y1_actual);
connect(dpHeaWatRemSet, ctlDpHeaWat.dpRemSet);
connect(dpHeaWatRem, ctlDpHeaWat.dpRem);
connect(dpHeaWatLocSet, ctlDpHeaWat.dpLocSet);
connect(dpHeaWatLoc, ctlDpHeaWat.dpLoc);
connect(dpChiWatRemSet, ctlDpChiWat.dpRemSet);
connect(dpChiWatRem, ctlDpChiWat.dpRem);
connect(dpChiWatLocSet, ctlDpChiWat.dpLocSet);
connect(dpChiWatLoc, ctlDpChiWat.dpLoc);
connect(ctlDpHeaWat.dpLocSetMax, dpHeaWatLocSetMax);
connect(ctlDpChiWat.dpLocSetMax, dpChiWatLocSetMax);
connect(rep3.y, ph.uPh);
connect(rep4.y, selSpeHea.u3);
connect(u1PumHeaWatPri, edgU1PumHeaWatPri.u);
connect(u1Hea, edgU1AndHea.u2);
connect(u1PumHeaWatPri_actual, u1HeaAndOn.u1);
connect(edgU1AndHea.y, latHea.u);
connect(phSpePumChiWatPri.y, setPumChiWatPriHdr.u1);
connect(ctlDpHeaWat.y, phSpePumHeaWatPri.u);
connect(ctlDpChiWat.y, phSpePumChiWatPri.u);
connect(phSpePumHeaWatPri.y, setPumHeaWatPriHdr.u1);
connect(phSpePumHeaWatPri.y, rep3.u);
connect(phSpePumChiWatPri.y, rep4.u);
connect(u1CooAndOn.y, phPumChiWatPriSta.uPh);
connect(phPumHeaWatPriSta.y, ctlDpHeaWat.y1_actual);
connect(u1HeaAndOn.y, phPumHeaWatPriSta.uPh);
connect(u1PumHeaWatPri_actual, phPumHeaWatPriSta.u);
connect(latCoo.y, u1CooAndOn.u2);
connect(latHea.y, selSpeHea.u2);
connect(latHea.y, u1HeaAndOn.u2);
connect(phSpePumChiWatPri.y, rep1.u);
connect(u1PumHeaWatPri_actual, u1CooAndOn.u1);
connect(u1Coo.y, edgU1Coo.u2);
connect(edgU1PumHeaWatPri.y, edgU1Coo.u1);
connect(edgU1PumHeaWatPri.y, edgU1AndHea.u1);
connect(edgU1Coo.y, latCoo.u);
connect(edgU1AndHea.y, latCoo.clr);
connect(edgU1Coo.y, latHea.clr);
end VariableSpeed;
 Buildings.Templates.Plants.Controls.Pumps.Primary.DisableDedicated
Buildings.Templates.Plants.Controls.Pumps.Primary.DisableDedicated Buildings.Templates.Plants.Controls.Pumps.Primary.EnableLeadHeadered
Buildings.Templates.Plants.Controls.Pumps.Primary.EnableLeadHeadered Buildings.Templates.Plants.Controls.Pumps.Primary.VariableSpeed
Buildings.Templates.Plants.Controls.Pumps.Primary.VariableSpeed