Buildings.Fluid.Sensors.UsersGuide
User's Guide
Information
This package contains models of sensors. There are models with one and with two fluid ports.
Selection and parameterization of sensor models
When selecting a sensor model, a distinction needs to be made whether the measured quantity depends on the direction of the flow or not, and whether the sensor output signal is the product of the mass flow rate and a medium property.
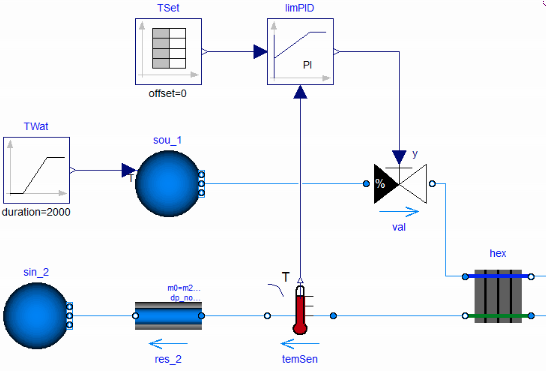
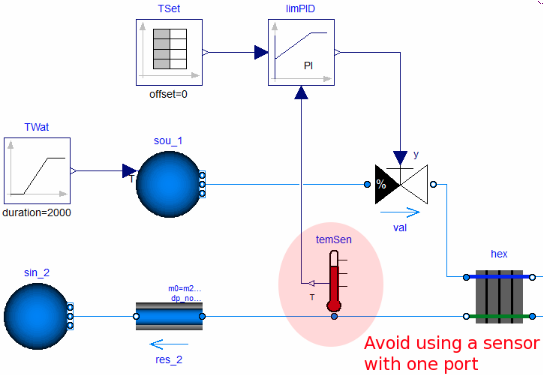
Output signals that depend on the flow direction and are not multiplied by the mass flow rate are temperature, relative humidity, water vapor concentration X, trace substances C and density. For such quantities, sensors with two fluid ports need to be used. An exception is if the quantity is measured directly in a fluid volume, which is the case for models from the package Buildings.Fluid.MixingVolumes. Therefore, to measure for example the outlet temperature of a heat exchanger, the configuration labelled correct use in the figure below should be used, and not the configuration labelled not recommended. For an explanation, see Modelica.Fluid.Examples.Explanatory.MeasuringTemperature.
| Correct use |
|
|---|---|
| Not recommended |
|
Except for the mass flow rate sensor, all sensors with two ports can be configured as dynamic sensors or as steady-state sensor. The list below advices on how to configure sensors.
-
Sensors for quantities that depend on the direction of the mass flow rate but not of its magnitude: Such quantities include density, mass fraction, PPM, relative humidity, specific enthalpy, specific entropy and trace substances. Not that these are all quantities that are carried by the fluid that flows through the sensor. For these sensors, if the parameter
allowFlowReversal=trueis set (which is the default setting), then it is strongly recommended to configure them as a dynamic sensor. This is the default setting.
Configuring a sensor as a dynamic sensor is done by setting the time constant to a non-zero value. Typically, settingtau=10seconds yields good results. Fortau=0, numerical problems may occur if the mass flow rate is close to zero andallowFlowReversal=true.
IfallowFlowReversal=false, then the measurement of these sensors only depends on properties atport_a. If the mass flow rate atport_ais ṁa ≤ 0, i.e., fluid flows fromport_btoport_a, the model still assumes ṁa > 0. Hence there are no numerical problems; but use of the sensor output may yield wrong results. Therefore, only setallowFlowReversal=falseif you can guarantee ṁa ≥ 0. -
Sensors for quantities that are the product of mass flow rate times a measured fluid property: Such quantities include volumentric flow rate or enthalpy flow rate. For these quantities, sensors are by default configured as steady-state sensor. These sensors may be configured by the user as a dynamic sensor by setting
tau > 0, but there is typically no benefit as these sensors typically do not cause numerical problems. The reason is that these sensors multiply the quantity that is carried by the flow, such as specific enthalpy h by the mass flow rate ṁ to compute the measured signal Ḣ=ṁ h. Hence, as the mass flow rate goes to zero, the sensor output signal also goes to zero, which avoids numerical problems. -
Static pressure measurements: For static pressure measurements, sensors always output the instantaneous measurement. These sensors cannot be configured to be dynamic.
The table below summarizes the recommendations for the use of sensors.
| Measured quantity | One port sensor | Two port sensor | |
|---|---|---|---|
steady-state (tau=0) |
dynamic (tau > 0) |
||
| temperature relative humidity mass fraction trace substances specific enthalpy specific entropy |
use only if connected to a volume | avoid | recommended |
| volume flow rate enthalpy flow rate entropy flow rate |
- | recommended | recommended |
| pressure | recommended | recommended | recommended |
Sensor Dynamics
Dynamic response to fluid flowing through the sensor
If a sensor is configured as a dynamic sensor by setting tau > 0,
then the measured quantity, say the temperature T, is
computed as
τ dT ⁄ dt = |ṁ| ⁄ ṁ0 (θ-T),
where τ is a user-defined time constant of the sensor (a suggested value is around 10 seconds, which is the default setting for the components), dT ⁄ dt is the time derivative of the sensor output signal, |ṁ| is the absolute value of the mass flow rate, ṁ0 is the user-specified nominal value of the mass flow rate and θ is the temperature of the medium inside the sensor. An equivalent physical model of such a sensor would be a perfectly mixed volume with a sensor that outputs the temperature of this volume. In this situation, the size of the volume would be V=τ ṁ0 ⁄ ρ, where ρ is the density of the fluid.
Dynamic response to ambient temperature
For the sensor
Buildings.Fluid.Sensors.TemperatureTwoPort,
by setting transferHeat = true, heat transfer to a
fixed ambient can be approximated. The heat transfer is computed as
τHeaTra dT ⁄ dt = (TAmb-T),
where τHeaTra is a fixed time constant and
TAmb is a fixed ambient temperature.
Setting transferHeat = true is useful if the sensor output T
is used to switch the mass flow rate on again. If transferHeat = false,
then the sensor output T remains constant if the mass flow rate is zero
and hence a fan or pump controller that uses this signal may never switch the device
on again.
If the sensor output T is not used to switch on the mass flow rate, then
in general one can use transferHeat=false.
Note that since in practice the heat transfer is due to a combination of ambient temperature and upstream or downstream fluid temperature, for example by two-way buoyancy-driven flow inside the duct or pipe, the model uses as an approximation a fixed ambient temperature. Since the sensor is not affecting the temperature of the medium, this approximation of the heat transfer does not add or remove heat from the fluid.
Combined dynamic response
For the sensor Buildings.Fluid.Sensors.TemperatureTwoPort, if both dynamic effects are enabled, then the output T is computed as
dT ⁄ dt = |ṁ| ⁄ ṁ0 (θ-T) ⁄ τ + (TAmb-T) ⁄ τHeaTra.
Implementation
The above equation is implemented in such a way that it is differentiable in the mass flow rate.
Note that the implementation of the dynamic sensors does not use the model Buildings.Fluid.MixingVolumes. The reason is that depending on the selected medium model, the mixing volume may introduce states for the pressure, species concentration, trace substance, specific enthalpy and specific entropy. Not all states are typically needed to model the dynamics of a sensor. Moreover, in many building system applications, the sensor dynamics is not of concern, but is rather used here to avoid numerical problems that steady-state models of sensors cause when flow rates are very close to zero.
Extends from Modelica.Icons.Information (Icon for general information packages).