Buildings.Fluid.Movers.UsersGuide
User's Guide
Information
This package contains models for fans and pumps. The same models are used for fans or pumps.
Model description
A detailed description of the fan and pump models can be found in Wetter (2013). The models are implemented as described in this paper, except that equation (20) is no longer used. The reason is that the transition (24) caused the derivative
d Δp(r(t), V(t)) ⁄ d r(t)
to have an inflection point in the regularization region r(t) ∈ (δ/2, δ). This caused some models to not converge. To correct this, for r(t) < δ, the term V(t) ⁄ r(t) in (16) has been modified so that (16) can be used for any value of r(t).
Below, the models are briefly described.
Performance data
The models use performance curves that compute pressure rise, electrical power draw and efficiency as a function of the volume flow rate and the speed. The following performance curves are implemented:
| Independent variable | Dependent variable | Record for performance data | Function |
|---|---|---|---|
| Volume flow rate | Pressure | flowParameters | pressure |
| Volume flow rate | Efficiency | efficiencyParameters | efficiency |
| Volume flow rate | Power* | powerParameters | power |
*Note: This record should not be used
(i.e. use_powerCharacteristic should be false)
for the movers that take as a control signal
the mass flow rate or the head,
unless also values for the record pressure are provided.
The reason is that for these movers the record pressure
is required to be able to compute the mover speed,
which is required to be able to compute the electrical power
correctly using similarity laws.
If a Pressure record is not provided,
the model will internally override use_powerCharacteristic=false.
In this case the efficiency records will be used.
Note that in this case an error is still introduced,
but it is smaller than when using the power records.
Compare
Buildings.Fluid.Movers.Validation.PowerSimplified
with
Buildings.Fluid.Movers.Validation.PowerSimplified
for an illustration of this error.
These performance curves are implemented in Buildings.Fluid.Movers.BaseClasses.Characteristics, and are used in the performance records in the package Buildings.Fluid.Movers.Data. The package Buildings.Fluid.Movers.Data contains different data records.
Models that use performance curves for pressure rise
The models Buildings.Fluid.Movers.SpeedControlled_y and Buildings.Fluid.Movers.SpeedControlled_Nrpm take as an input either a control signal between 0 and 1, or the rotational speed in units of [1/min]. From this input and the current flow rate, they compute the pressure rise. This pressure rise is computed using a user-provided list of operating points that defines the fan or pump curve at full speed. For other speeds, similarity laws are used to scale the performance curves, as described in Buildings.Fluid.Movers.BaseClasses.Characteristics.pressure.
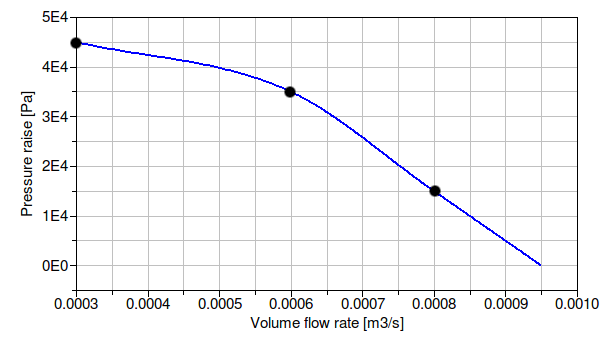
For example, suppose a pump needs to be modeled whose pressure versus flow relation crosses, at full speed, the points shown in the table below.
| Volume flow rate [m3⁄h] | Head [Pa] |
|---|---|
| 0.0003 | 45000 |
| 0.0006 | 35000 |
| 0.0008 | 15000 |
Then, a declaration would be
Buildings.Fluid.Movers.SpeedControlled_y pum(
redeclare package Medium = Medium,
per.pressure(V_flow={0.0003,0.0006,0.0008},
dp ={45,35,15}*1000))
"Circulation pump";
This will model the following pump curve for the pump input signal y=1.
Models that directly control the head or the mass flow rate
The models Buildings.Fluid.Movers.FlowControlled_dp and Buildings.Fluid.Movers.FlowControlled_m_flow take as an input the pressure difference or the mass flow rate. This pressure difference or mass flow rate will be provided by the fan or pump, i.e., the fan or pump has idealized perfect control and infinite capacity. Using these models that take as an input the head or the mass flow rate often leads to smaller system of equations compared to using the models that take as an input the speed.
These models can be configured for three different control inputs. For Buildings.Fluid.Movers.FlowControlled_dp, the head is as follows:
-
If the parameter
inputType==Buildings.Fluid.Types.InputType.Continuous, the head isdp=dp_in, wheredp_inis an input connector. -
If the parameter
inputType==Buildings.Fluid.Types.InputType.Constant, the head isdp=constantHead, whereconstantHeadis a parameter. -
If the parameter
inputType==Buildings.Fluid.Types.InputType.Stages, the head isdp=heads, whereheadsis a vectorized parameter. For example, if a mover has two stages and the head of the first stage should be 60% of the nominal head and the second stage equal todp_nominal, setheads={0.6, 1}*dp_nominal. Then, the mover will have the following heads:input signal stageHead [Pa] 0 0 1 0.6*dp_nominal 2 dp_nominal
Similarly, for Buildings.Fluid.Movers.FlowControlled_m_flow, the mass flow rate is as follows:
-
If the parameter
inputType==Buildings.Fluid.Types.InputType.Continuous, the mass flow rate ism_flow=m_flow_in, wherem_flow_inis an input connector. -
If the parameter
inputType==Buildings.Fluid.Types.InputType.Constant, the mass flow rate ism_flow=constantMassFlowRate, whereconstantMassFlowRateis a parameter. -
If the parameter
inputType==Buildings.Fluid.Types.InputType.Stages, the mass flow rate ism_flow=massFlowRates, wheremassFlowRatesis a vectorized parameter. For example, if a mover has two stages and the mass flow rate of the first stage should be 60% of the nominal mass flow rate and the second stage equal tom_flow_nominal, setmassFlowRates={0.6, 1}*m_flow_nominal. Then, the mover will have the following mass flow rates:input signal stageMass flow rates [kg/s] 0 0 1 0.6*m_flow_nominal 2 m_flow_nominal
These two models do not need to use a performance curve for the flow characteristics. The reason is that
- for given pressure rise (or mass flow rate), the mass flow rate (or pressure rise) is computed from the flow resistance of the duct or piping network, and
- at zero pressure difference, solving for the flow rate and the revolution leads to a singularity.
However, the computation of the electrical power consumption requires the mover speed to be known and the computation of the mover speed requires the performance curves for the flow and efficiency/power characteristics. Therefore these performance curves do need to be provided if the user desires a correct electrical power computation. If the curves are not provided, a simplified computation is used, where the efficiency curve is used and assumed to be correct for all speeds. This loss of accuracy has the advantage that it allows to use the mover models without requiring flow and efficiency/power characteristics.
The models
Buildings.Fluid.Movers.FlowControlled_dp and
Buildings.Fluid.Movers.FlowControlled_m_flow
both have a parameter m_flow_nominal. For
Buildings.Fluid.Movers.FlowControlled_m_flow, this parameter
is used for convenience to set a default value for the parameters
constantMassFlowRate and
massFlowRates.
For both models, the value is also used for the following:
- To compute the size of the fluid volume that can be used to approximate the inertia of the mover if the energy dynamics is selected to be dynamic.
-
To compute a default pressure curve if no pressure curve has been specified
in the record
per.pressure. The default pressure curve is the line that intersects(dp, V_flow) = (dp_nominal, 0)and(dp, V_flow) = (m_flow_nominal/rho_default, 0). - To regularize the equations near zero flow rate to ensure a numerically robust model.
However, otherwise m_flow_nominal does not affect the mass flow rate of the mover as
the mass flow rate is determined by the input signal or the above explained parameters.
Start-up and shut-down transients
All models have a parameter use_inputFilter. This
parameter affects the fan output as follows:
-
If
use_inputFilter=false, then the input signaly(orNrpm,m_flow_in, ordp_in) is equal to the fan speed (or the mass flow rate or pressure rise). Thus, a step change in the input signal causes a step change in the fan speed (or mass flow rate or pressure rise). -
If
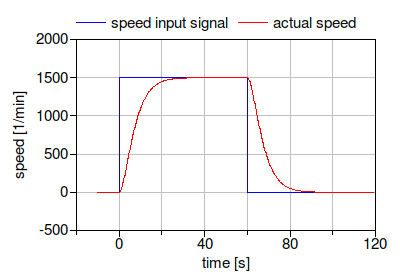
use_inputFilter=true, which is the default, then the fan speed (or the mass flow rate or the pressure rise) is equal to the output of a filter. This filter is implemented as a 2nd order differential equation and can be thought of as approximating the inertia of the rotor and the fluid. Thus, a step change in the fan input signal will cause a gradual change in the fan speed. The filter has a parameterriseTime, which by default is set to 30 seconds. The rise time is the time required to reach 99.6% of the full speed, or, if the fan is switched off, to reach a fan speed of 0.4%.
The figure below shows for a fan with use_inputFilter=true
and riseTime=30 seconds the
speed input signal and the actual speed.
Although many simulations do not require such a detailed model
that approximates the transients of fans or pumps, it turns
out that using this filter can reduce computing time and
can lead to fewer convergence problems in large system models.
With a filter, any sudden change in control signal, such as when
a fan switches on, is damped before it affects the air flow rate.
This continuous change in flow rate turns out to be easier, and in
some cases faster, to simulate compared to a step change.
For most simulations, we therefore recommend to use the default settings
of use_inputFilter=true and riseTime=30 seconds.
An exception are situations in which the fan or pump is operated at a fixed speed during
the whole simulation. In this case, set use_inputFilter=false.
Note that if the fan is part of a closed loop control, then the filter affects
the transient response of the control.
When changing the value of use_inputFilter, the control gains
may need to be retuned.
We now present values control parameters that seem to work in most cases.
Suppose there is a closed loop control with a PI-controller
Buildings.Controls.Continuous.LimPID
and a fan or pump, configured with use_inputFilter=true and riseTime=30 seconds.
Assume that the transient response of the other dynamic elements in the control loop is fast
compared to the rise time of the filter.
Then, a proportional gain of k=0.5 and an integrator time constant of
Ti=15 seconds often yields satisfactory closed loop control performance.
These values may need to be changed for different applications as they are also a function
of the loop gain.
If the control loop shows oscillatory behavior, then reduce k and/or increase Ti.
If the control loop reacts too slow, do the opposite.
Efficiency and electrical power consumption
All models compute the motor power draw Pele, the hydraulic power input Whyd, the flow work Wflo and the heat dissipated into the medium Q. Based on the first law, the flow work is
Wflo = | V̇ Δp |,
where V̇ is the volume flow rate and
Δp is the pressure rise.
The heat dissipated into the medium is as follows:
If the motor is cooled by the fluid, as indicated by
per.motorCooledByFluid=true, then the heat dissipated into the medium is
Q = Pele - Wflo.
If per.motorCooledByFluid=false, then the motor is outside the fluid stream,
and only the shaft, or hydraulic, work Whyd enters the thermodynamic
control volume. Hence,
Q = Qhyd - Wflo.
The efficiencies are computed as
η = Wflo ⁄ Pele = ηhyd ηmot
ηhyd = Wflo ⁄ Whyd
ηmot = Whyd ⁄ Pele
where ηhyd is the hydraulic efficiency, ηmot is the motor efficiency and Q is the heat released by the motor.
If per.use_powerCharacteristic=true,
then a set of data points for the power Pele for different
volume flow rates at full speed needs to be provided by the user.
Using the flow work Wflo and the electrical power input
Pele, the total efficiency is computed as
η = Wflo ⁄ Pele,
and the two efficiencies ηhyd and ηmot are computed as
ηhyd = 1,
√ηmot = η.
However, if per.use_powerCharacteristic=false, then
performance data for
ηhyd and
ηmot need to be provided by the user, and hence
the model computes
η = ηhyd ηmot
Pele = Wflo ⁄ η.
The efficiency data for the motor are a list of points V̇ and ηmot.
Fluid volume of the component
All models can be configured to have a fluid volume at the low-pressure side. Adding such a volume sometimes helps the solver to find a solution during initialization and time integration of large models.
Enthalpy change of the component
If per.motorCooledByFluid=true, then
the enthalpy change between the inlet and outlet fluid port is equal
to the electrical power Pele that is consumed by the component.
Otherwise, it is equal to the hydraulic work Whyd.
The parameter addPowerToMedium, which is by default set to
true, can be used to simplify the equations.
If addPowerToMedium = false, then no enthalpy change occurs between
inlet and outlet.
This can lead to simpler equations, but the temperature rise across the component
will be zero. In particular for fans, this simplification may not be permissible.
Differences to models in Modelica.Fluid.Machines
The models in this package differ from Modelica.Fluid.Machines primarily in the following points:
-
They use a different base class, which allows to have zero mass flow rate.
The models in
Modelica.Fluidrestrict the number of revolutions, and hence the flow rate, to be non-zero. -
For the model with prescribed pressure, the input signal is the
pressure difference between the two ports, and not the absolute
pressure at
port_b. -
The pressure calculations are based on total pressure in Pascals instead of the pump head in meters.
This change was done to avoid ambiguities in the parameterization if the models are used as a fan
with air as the medium. The original formulation in
Modelica.Fluid.Machines converts head
to pressure using the density
medium.d. Therefore, for fans, head would be converted to pressure using the density of air. However, for fans, manufacturers typically publish the head in millimeters water (mmH20). Therefore, to avoid confusion when using these models with media other than water, we changed the models to use total pressure in Pascals instead of head in meters. - The performance data are interpolated using cubic hermite splines instead of polynomials. These functions are implemented in Buildings.Fluid.Movers.BaseClasses.Characteristics.
References
Michael Wetter. Fan and pump model that has a unique solution for any pressure boundary condition and control signal. Proc. of the 13th Conference of the International Building Performance Simulation Association, p. 3505-3512. Chambery, France. August 2013.
Extends from Modelica.Icons.Information (Icon for general information packages).